Download
1 / 16
160 likes | 311 Views
=. +. -. º. 2. 2. f. '. (t). (cost). (. sint). 1. 1. 1. =. -. +. i. j. 0. k. 2. 2. r. '. (t. ). =. 0. T. (t. ). 0. r. '. (t. ). 0. =. +. +. 2. 2. 2. 2. r. '. (t). 1. (2t). (3t. ). 1. 2. 3. 1. =. +. +. T. (1). i. j. k. =. 2. (*). T.

E N D
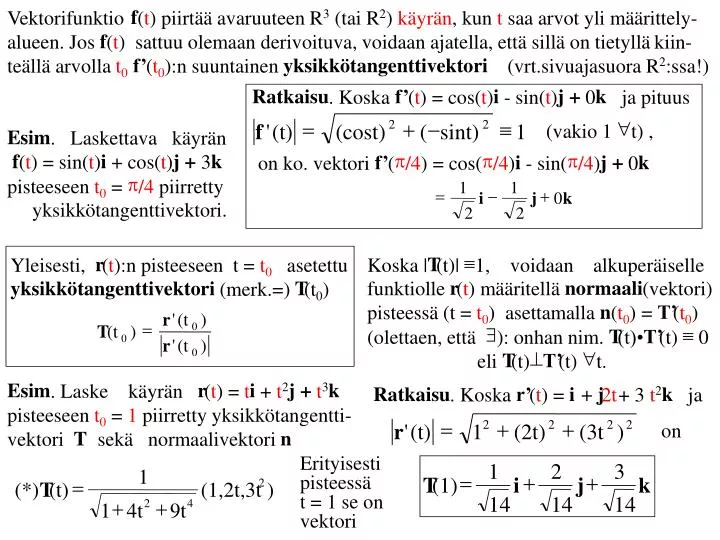
= + - º 2 2 f ' (t) (cost) ( sint) 1 1 1 = - + i j 0 k 2 2 r ' (t ) = 0 T (t ) 0 r ' (t ) 0 = + + 2 2 2 2 r ' (t) 1 (2t) (3t ) 1 2 3 1 = + + T (1) i j k = 2 (*) T (t) (1,2t,3t ) 14 14 14 + + 2 4 1 4t 9t f Vektorifunktio ( t ) piirtää avaruuteen R (tai R ) käyrän , kun t saa arvot yli määrittely- 3 2 f alueen. Jos ( t ) sattuu olemaan derivoituva, voidaan ajatella, että sillä on tietyllä kiin - f’ yksikkötangenttivektori teällä arvolla t ( t ):n suuntainen ( vrt .sivuajasuora R : ssa !) 2 0 0 Ratkaisu f’ i j + k . Koska ( t ) = cos ( t ) - sin ( t ) 0 ja pituus " (vakio 1 t) , Esim . Laskettava käyrän p p p f i j + k ( t ) = sin ( t ) + cos ( t ) 3 f’ i j + k on ko . vektori ( /4 ) = cos ( /4 ) - sin ( /4 ) 0 p pisteeseen t = /4 piirretty 0 yksikk ö tangenttivektori. º r T Yleisesti, ( t ):n pisteeseen t = t asetettu Koska | (t)| 1, voidaan alkuper ä iselle 0 r normaali yksikkötangenttivektori T funktiolle ( t ) määritellä (vektori) ( merk .=) (t ) 0 n T’ pisteessä (t = t ) asettamalla ( t ) = ( t ) 0 0 0 $ º T T’ (olettaen, että ): onhan nim . (t)• (t) 0 ^ " T T’ eli (t) (t) t. Esim r i j + k . Laske käyrän ( t ) = t + t t 2 3 Ratkaisu r’ i + j k . Koska ( t ) = 2t + 3 t ja 2 pisteeseen t = 1 piirretty yksikk ö tangentti- 0 on T n vektori sek ä normaalivektori Erityisesti pisteessä t = 1 se on vektori
(eräs!) Normaalivektori n(t) saadaan derivoimalla vektori Saadaan laskettu malliksi... Erityisesti pisteessä t = 1 se on vektori Huom. Normaalivektoriksi voitaisiin valita myös n(t0) = -r’(t0) , sillä myös -r(t)•(-r’(t)) 0, eli määrittelemämme normaalivektori n ei ole yksikäsitteinen. Olemme myös kiinnostuneita siitä normaalivek- torista, jokin jollakin intuitiivisella tavalla osoittaa, ’minne käyrä on kääntymässä’. Siispä määritellään pääyksikkönormaalivektori (principal unit normal vector) N kahdesti derivoituvan vektorifunktion r(t) = (x(t), y(t), z(t)) kaareutuvuudenκavulla (ja oletuksella, ettei r’(t) ole = 0). Asian hahmottamista saattaa helpottaa, jos ajattelee, että jos r(t) ilmoittaa paikan hetkellä t, niin r’(t) ilmoittaa nopeuden eli r’(t) = v(t).
Olkoon siis r(t) = (x(t), y(t), z(t)) kahdesti derivoituva vektorifunktio ja r’(t) = v(t) ¹0. Määritellään vektorifunktion rkaareutuvuusκ lausekkeella missä T on vastaava yksikkötangenttivektori: Esim. Tarkastellaan spriraalia r(t) = (cos(t), sin(t), t) Sille T(t) on = Edelleen, tämän pituus... Siten Johdimme käyrän r(t) kaaren pituudelle lausek- keen Jos tässä |v(t)| on aina positiivinen, on s(t) aidosti kasvava, joten sillä on käänteisfunktio, merkitään sitä t(s). Lisäksi derivoimalla saadaan, että s’(t) = |v(t)|. Näin ollen käyrä r(t) = (x(t), y(t), z(t)) voidaan ilmaista (pisteestä t0 alkavan) pituuden s funktiona eli r(s) = (x(s), y(s), z(s)). PääyksikkönormaaliN määritellään nyt kaavalla ’N sojottaa siihen suuntaan, mihin käyrä on kääntymässä’
Esimerkki. Tarkastellaan edelleen spiraalia r(t) = (cos(t), sin(t), t). Parametrisoidaan aluksi r pisteestä (1,0,0) lähtevän pituutensa s(t) funktioksi (tässä pisteessä t = 0). Koska yleisesti on pituuden lauseke r parametrisoituna s:n Nyt s(t):llä on käänteisfunktio t(s), joka on Tästä voidaan laskea... suhteen on siten Edelleen... ...yksikkötangenttivektori (derivoidaan s:n suhteen!) T(s): Siis pääyksikkönormaali on
Edwards&Penney Luku 12.3 Siirrymme nyt uuteen funktiotyyppiin eli usean muuttajan reaaliarvoisiin funktioihin eli kuvauksiin f: Rn→R, missä n ³ 2. Erikoistapaus näistä ovat neliömuodot, pari kuvana: Jos aikaa on, niin tästä voi katsella lisää:
Tarkastellaan muotoa (*) Ax2 + By2 + Cz2 + 2Dxy + 2Eyz + 2Fxz + Gx + Hy + Iz = J olevaa yhtälöä, missä kertoimet A, ..., J on kiinnitetty. Tässä x ja y ovat vapaita muuttujia ne määräävät z:n arvot eli voidaan ajatelle, että yhtölä (*) on kahden muuttujan funktio z = f(x,y). Jos (*) edustaa jotakin neliömuotoa, niin se saadaan selville seuraavasti: 10 Ensin huomataan, että yhtölö (*) voidaan esittää matriisien avulla seuraavasti: eli XQXT + RTXT = J 20 Mahdollinen neliömuoto määräytyy nyt matriisin Q ominaisarvojen l1, l2, l3, ja vakion J etumerkien mukaan seuraavasti: 30 Pinnan pääakselikoordinaatisto on vast. ortonormaalien ominaisvektoreiden määräämä 40 Piste X0 jolle QX0 = -1/2R ilmoittaa pinnan (mahdollisen) keskipisteen. Jos R = 0, on tämä keskipiste origossa.
Esimerkki. Tutkitaan pintaa (*) 5x2 + 5y2 + 8z2 + 8xy + 4yz - 4xz = 1, matriisimuodossa Koska R = 0, on pinnan mahdollinen keskipiste origossa. Lasketaan Q:n ominaisarvot eli ratkaistaan l yhtälöstä det(Q – lI) = 0: Tästä jo nähdään, että ensimmäinen ominaisarvo on l1 = 9 > 0, edelleen pitää olla Siten muut ominaisarvot ovat l2 = 9 > 0 ja l3 = 0. Taulukosta nähdään: Lasketaan sitten pääakselikoordinaatit; ne saadaan Q:n (ortogonaalisista) ominaisvek- toreista. Ominaisarvoa l1,2 = 9 varten pitää ratkaista ’matriisiyhtälö’ (Q – 9I)X = 0, Tehdään se matriisin vaakarivimuunnoksilla: Sen toteuttavat kaikki tason -2x+2y-z=0 vektorit. Niiden pitää olla keskenään kohtisuoria, esimerkiksi ovat Tämä vastaa yhtälöä
Ominaisarvoa l3 = 0 varten pitää ratkaista ’matriisiyhtälö’ (Q – 0I)X = 0. Tehdään sekin matriisin vaakarivimuunnoksilla: Tämä vastaa yhtälöä Ensimmäisen rivin nojalla x + y = 0 eli x = -y, ja kolmannen rivin nojalla -2x – 2x + 8z = 0 eli x = 2z eräs tällainen vektori on Koska X3 liittyy eri ominaisarvoon kuin X2 ja X1, on kohtisuoruus taattu. ks. http://math.tut.fi/courses/imavideo/
Sylinteri- ja pallokoordinaatit R3:ssa: Kompleksilukuja käsiteltäessä otettiin käyttöön kompleksitaso ja siellä napakoordinaatit: y (x,y) y— • Avaruudessa R2 pisteen kartesisten koordinaattien (x,y) ja napakoordinaattien (r, ) välillä on muunnoskaavat r Edwards&Penney Luku 12.4 | x x Avaruudessa R3 pisteen kartesiset koordinaatit (x,y,z) voidaan yleistää lukuisalla eri tavalla (’ei-standardit’ koordinaatit otetaan käyttöön mm. laskujen helpottamiseksi!) Esim. Mitä kartesista pistettä esittää sylin- terikoordinaatiston piste (2, /3, -5)? Sylinterikoordinaatit: Kaavat (*) & ’z=z’ z r z • (x,y,z) Ratkaisu. Kaavojen (*) perusteella z x = rcos y = rsin r Siis pistettä (1,3, -5) y x
Esim. Ilmoita kartesisen pisteen (-3,3,7) sylin-terikoordinaatit Ratkaisu. z = 7 ja kaavojen (*) nojalla Siten sylinterikoordinaatit ovat (32, 3/4, 7) Sylinterikoordinaatistossa ajatellaan, että piste on ’korkeudella z r-säteisen ympyrän ke- hällä kulman [0,2] verran x-akselista vastapäivään mitattuna’) Pallokoordinaatistossa ajatellaan, että piste on ’-säteisen pallon pinnalla’ Pallokoordinaatit Karteesiesen koordinaatiston piste (x,y,z) voidaan ilmaista yksikäsitteisesti myös lukukolmikkona (, , ), missä - > 0 (’roo’) ilmaisee etäisyyden origosta, siis z • (x,y,z) z - [0,2](’theta’) kuten sylinterikoordinaatistossa y r x y x - [0,] (’phii’) on kulma posit.z-akselin kanssa Muunnoskaavat toiseen suuntaan: x = sin()cos() y = sin()sin() z = cos()
Esim. Mitä kartesisen koordinaatiston pistettä (x,y,z) esittää pallokoordinaatiston piste (, , ) = (3,/4 , 5/12)? Ratkaisu. Siis kysytyt pallokoordinaatit ovat (likiarvona) (2.05 , 2.05 , 0.78) Esim. Muuta pallokoordinaateiksi (, , ) kartesinen piste (x,y,z) = (1,1,1). Ratkaisu. No mitä hyötyä näistä nyt sitten on? Katsotaan esimerkkejä
Edwards&Penney Luku 13.1-.3Usean muuttujan funktioista Tähän asti useimmat käsittelemämme funktiot ovat olleet yhden muuttujan funktiota, joko reaalisarvoisia tai vektori- arvoisia, ts. funktion arvo on riippunut vain yhdestä teki- jästä eli argumentista. Nyt alamme käsitellä uutta funktio- tyyppiä, nim.funktiota, joiden arvo riippuu monesta tois- sistaan riippumattomasta tekijästä. Tutustuimme jo neliö-muotoihin. Uutena esimerkkinä on vaikkapa tynnyrin tilavuus V, joka riippuu sekä korkeudesta h että pohjan säteestä r kaavan V(h,r) = r2h mukaisesti. r h Määr. n:n muuttujan (reaaliarvoinen) funktio f:RnR liittää jokaiseen järjestettyyn n- nikköön (x1,…,xn) tarkalleen yhden arvon f (x1,…,xn) = y. Esim. Kolmen muuttujan funktion f(x,y,z) = x2-z + cos(y) määralue on RRR+{0} ja arvojoukko koko R. Jatkossa keskitytään aluksi kahden muuttujan funktioihin, kuten f(x,y) = ex + tan(xy) ja g(x,y) = xy- sin(x)cos(y), mutta teoria soveltuu kaikille n:n muut- tujan funktioille. Huom. On oleellisen tärkeää huomata, että muuttujat x ja y ovat funktiossa f(x,y) tois- sistaan riippumattomia (eli toisen arvo ei mitenkään rajoita toisen arvoa): näin on asian- laita esim. funktiossa f(x,y) = cos(x)sin(y), mutta merkintä cos(x)sin(y) = 1 on jo ilmaus yhden muuttujan implisiittifunktiosta; jos x:lle annetaan jokin kiinteä arvo kaavassa cos(x)sin(y) = 1, ei y:n arvo enää ole vapaasta valittavissa. (ja kääntäen).
Funktiota f:R2R voidaan havainnollistaa kolmiulotteisten graafien avulla. Esim. , sen määrittelyalue on D(f) = {(x,y)R2| 1 x2+y2} z Kyseessä on elliptisen hyperpoloidin yläosa. Esim. Ax+By+Cz = D eli f(x,y) = z = 1/C[-Ax-By+D] on tason yhtälö. 1= x2+y2 y Raja-arvoista Yhden muuttujan funktion raja-arvojen tapauk- sassa pistettä x0 voidaan lähestyä vain kahdelta suunnalta: oikealta tai vasemmalta: x | x0 Kahden muuttujan funktion tapauksessa lähes- tymisteitä kohti pistettä (x0,y0) ääretön määrä: Löysä määritelmä: 2 muuttujan funk- tion f(x,y) raja-arvoa pisteessä (x0,y0) merkitään lim(x,y) (x0,y0)f(x,y) = LR kun arvo on tiestä riippumaton. Tarkka määritelmä: > 0: > 0: Tämän vuoksi raja-arvon olemassaolo ei saa riippua tiestä, jota pitkin pistettä (x0,y0) lähestytään. Määritellään ja merkitään • (x0,y0)
Esim. Onko funktiolla raja-arvoa pisteessä (0,0) (arvoa sillä origossa ei ole, sillä funktio ei ole määritelty pisteessä (0,0)). Tutkitaan mahdollista raja-arvoa eri lähestymisteitä pitkin: Valitaan ensin tie y = 3x: Johtopäätös: raja-arvoa ei ole olemassa. Maplekuva: Jos taas lähestytään pistettä (0,0) paraabelia y =x2 pitkin, niin Raja-arvon olemassaoloon riittää tällä kurssilla osoittaa: jos f(x,y) = g(x,y) aina, kun x xo ja y yo, on limf(x,y) = limg(x,y). ’Tutut’ raja- arvon ominaisuudet pätevät taaskin, esim. ’ lim[f(x,y) + g(x,y)] = lim[f(x)] + lim[g(x)]’ Huom. Raja-arvon olemassaolon todistaminen on paljon työläämpää kuin vasta-esimerkin löytäminen! Kuten yhden muuttujan tapauksessa, asetetaan nytkin funktion jatkuvuuden (pisteessä) määritelmä, nimittäin Määr. Funktio f(x,y) on jatkuva pisteessä (a,b), jos lim(x,y)(a,b)f(x,y) = f(a,b), ts. (a) f(a,b) on määritelty (b) lim(x,y)(a,b)f(x,y) ja (c) lim(x,y)(a,b)f(x,y) = f(a,b). Esim. Miten funktio tulisi määritellä suoralla x = y, jotta se olisi jatkuva koko R2:ssa?
Ratkaisu. Kun xy, on Kun x = y, on (x+y)(x2+y2)=2x2x2 =4x3. Määritellään siis Silloin lim xy f(x,y) = f(x,x) aina. Funktion f(x,y) jatkuvuus jossakin alueessaR2 tarkoittaa jatkuvuutta jokaisessa alueen pisteessä. Jatkuvuuden geom. merkitys:funktion kuvaaja on ’yhtenäinen pinta’ kyseissä alueessa, mutta... ...valitaan origon lähestymistieksi hyperbolinen spiraali r = 1ja muutetaan tarkasteltava raja-arvo napakoordi- naattimuotoon, jolloin Esim. Onko raja-arvo olemassa? Katsotaan ensin kuvaa: raja-arvo saa muodon Kuvan perusteella ongelmia en näyttäsi olevan. Raja-arvoa ei kuitenkaan ole. Nimittäin.. Mutta kyseinen raja-arvo ei ole olemassa! Johtopäätös: vaikka funktion kuvaaja näyttäisi olevan ’yhtenäinen pinta’ ei tästä voi vetää johtopäätöstä, että funktio olisi jatkuva!
Kahden muuttujan funktion osittaisderivaatoista (Edwards&Penney Luku 13.4) Jos funktio z = f(x,y) on jatkuva jossakin alueessa, voidaan pitää hetken y vakiona, eli jäljelle jää yhden muuttujan funktio; jos tämä funktio on derivoituva x:n suhteen, on funktiolla f(x,y) osittaisderivaatta x:n suhteen; merkitään f1(x,y) tai fx(x,y) tai f/x tai z/x [ luetaan doo]. Esim. f(x,y) = 2x2 + xy2 + sin(xy)+exy, jolloin f/x = 4x + y2 + ycos(xy) + yexy. Vastaavasti määritellään ja lasketaan funktion f(x,y) osittaisderivaatta y:n suhteen, ja sitä merkitään f2(x,y) tai fy(x,y) tai f/y tai z/y. Esim. f(x,y) = 2x2 + xy2 + sin(xy)+exy, on f/y = 2xy + xcos(xy) + xexy. Korkeamman kertaluvun osittaisderivaatat määritellään ja lasketaan luonnollisesti,esim. kun f(x,y) = 3sin2x·cosy, on f/x =6sinx·cosx·cosy ja 2f/x2= 6cosy(cos2x - sin2x). Huomautus. Osittaisderivaatat voidaan tietysti määritellä myös mielivaltaiselle n:n muuttujan funktiolle. Esim. Jos f(x,y,z,t,v) = 2xy2z3t4v5, on f/v = 52xy2z3t4v4= 10xy2z3t4v4 Huomautus. Merkintä (esim.) f12 ei aina ole täysin yksikäsitteinen; jos funktiossa on enemmän kuin 11 muuttujaa, voi f12 tarkoittaa joko osittaisderivaattaa 12. muuttujan suhteen, tai toisen kertaluvun sekaderivaattaa, joka lasketaan derivoimalla f ensin ensimmäisen muuttujan suhteen ja sitten toisen muuttujan suhteen!
