Download
1 / 14
140 likes | 154 Views
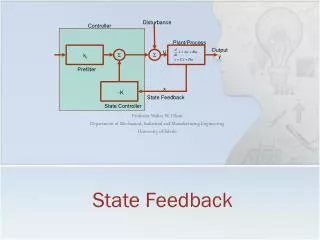
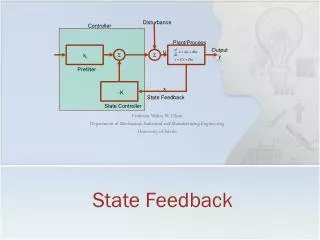
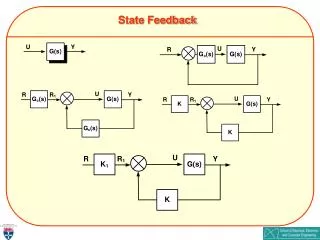
A. B. . C. K. Implementing State Feedback. What if the state- variables are not measurable?. ?. OBSERVERS. How do we implement u =K x + v if the states are not directly measurable?. ?. Note that state-feedback is needed not only for pole-placement, but also for other problems.

E N D
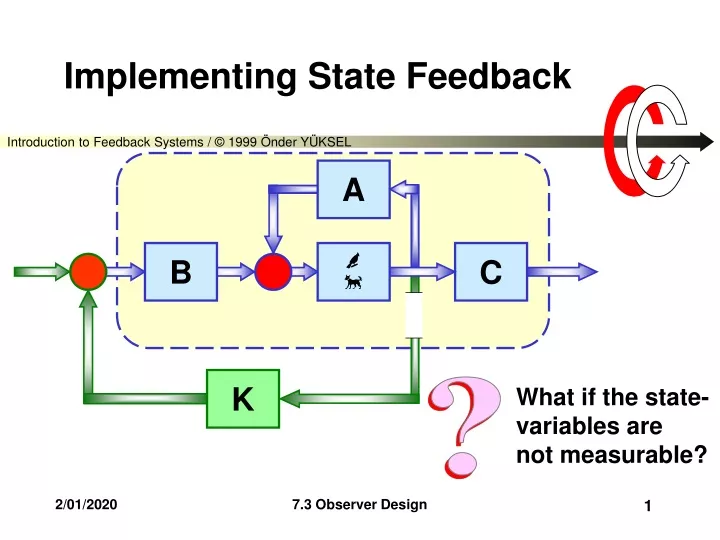
A B C K Implementing State Feedback What if the state- variables are not measurable? ? 7.3 Observer Design
OBSERVERS • How do we implement • u=Kx+v • if the states are not directly measurable? ? Note that state-feedback is needed not only for pole-placement, but also for other problems 7.3 Observer Design
u y x Suggestions plant Works only if initial conditions are the same! Useless! simulation 7.3 Observer Design
u y If observable x Another suggestion plant Useless! But differentiators are not physically realizable! 7.3 Observer Design
u y x Modify 1st suggestion: ! Use available information for feedback! =Cx Plant Aim at an estimate ! zx Observer 7.3 Observer Design
Plant Observer Is an observer if: Luenberger observer 7.3 Observer Design
Differential eq’n for the error 7.3 Observer Design
Choice! H=B F=A-GC 7.3 Observer Design
Plant parameters F=A-GC Design parameters H=B Design Equations Choose G to satisfy 2 with F stable! 7.3 Observer Design
Obs. Prob. for {A,C} PPP for {A’,C’} {A’,C’} controllable {A,C} observable Remarks Λ{A-GC} = Λ{A’-G’C’} Has a solution iff{A’,C’} is controllable 7.3 Observer Design
Conclusion An observer can be designed with arbitrarily specified stable eigen-values iff the plant is observable! 7.3 Observer Design
Procedure Decide about the observer eigen-values λi i=1, 2, ….n Solve the PPP for A’, C’ & λi G’ G F=A-GC H=B & 7.3 Observer Design
Further remarks Observer introduces n new eigenvalues Choose them far to the left About 10 times ! • Don’t make them too negative! • i) requires large amplifier gains • ii) increases noise (BW) ! 7.3 Observer Design
End of Section Next section Restart section Next chapter Restart chapter i The End General index End show 7.3 Observer Design