Download
1 / 36
360 likes | 432 Views
Explore EM algorithm-based detector for fast fading multipath environments, performance comparisons, conclusions, and future work. Discuss channel modeling, time-frequency representation, canonical basis, and the iterative nature of the EM algorithm.

E N D
EM based Multiuser detection in Fading Multipath Environments Mohammad Jaber Borran, Željko akareski, Ahmad Khoshnevis, and Vishwas Sundaramurthy
Outline • Motivation • Time-frequency representation • Channel modeling
Outline(continued) • Expectation Maximization algorithm • EM algorithm based detector • Performance comparison • Conclusions and future work
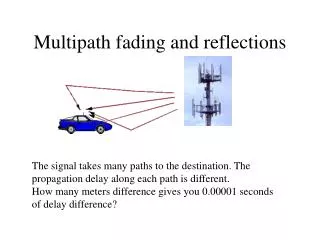
Multipath • Fading • MAI Environment • Noise
Time-Frequency RepresentationWhat is TFR? • A 2-D signal representation • Facilitates signaling by exploiting multipath and Doppler • Identifies Doppler as another dimension for diversity
Tc M 1/T t Doppler -M Multipath Canonical Coordinates Canonical basis corresponding to the uniform grid L
Channel ModelingRequirements • Multipath environment • Independent paths • Rayleigh fast fading
Channel ModelingOur approach • Jakes’ model for individual paths • Independence assured by having: Spacing >> Tcoh ( ~ ) • Random delays for different multipath components • Canonical representation
Channel ModelingCharacterization • Linear time-varying system n(t) s(t) x(t) r(t) + h(t, ) • Represented by its impulse response h(t, )
Incorporate the canonical model into h(t, ) Channel ModelingCharacterization • The output r(t) determined as :
Channel ModelingCharacterization • Spreading function H(, ) • Canonical finite-dimensional representation : where
In our case Channel ModelingCharacterization • Bandlimited approximation of H(, )
Channel ModelingCharacterization where Ei(t) : Jakes’ model rep. for path i
EM AlgorithmIntroduction • Goal: • K-dim problem, direct approach is difficult. • Define complete data, i.e. y, such that
EM AlgorithmIntroduction (cnt’d) and • Since y is unavailable, • b is unknown,
EM AlgorithmIterative Nature, Decomposition • Provides an iterative method for ML estimation: • E step: Compute U(b,b(n)) • M step: • K 1-dim problems (with suitable complete data) • The value of b(0) is important.
New Multiuser Detection SchemeComplete Data • The log-likelihood function • Define complete data, y(t) = (y1(t), …, yK(t)), as
New Multiuser Detection SchemeIterative Expression, Special Cases • Defining • Assuming • bk=1 Multistage • bk=0 Time-Frequency RAKE receiver
New Multiuser Detection SchemeBlock Diagram b(0) b(1) b(n-1) b(n) ... sgn I-b sgn I-b sgn + + b b ... TF RAKE + MRC MAI Estimation & Cancellation MAI Estimation & Cancellation ... r(t) HHz
Conclusion • Canonical representation + EM algorithm New Detector for Fast Fading Multipath Env. • Two special cases: TF RAKE and MultiStage • Outperforms TF RAKE and MultiStage • For rapid convergence use appropriatebk
Future work • Theoretical error probability analysis • Near-Far resistance analysis • Optimum value for bk • Extension to asynchronous case
Signal model Cross correlation matrix where
New Multiuser Detection SchemeExpectation Calculation Step • The new log-likelihood function • It can be shown that
Canonical RAKE • The coordinates for each symbol of a particular user are computed by:
Channel Modeling Visualization of