Download
1 / 2
0 likes | 7 Views
Point clouds to 3D have become an integral part of modern technological advancements, Point cloud to 3D especially in fields like computer vision, robotics, and augmented reality. They represent a collection of data points in a three-dimensional space, captured by various sensors like LiDAR or photogrammetry. One of the most exciting applications of point clouds is their conversion into detailed 3D models. In this article, we will delve into the best techniques for transforming point clouds into stunning 3D representations. The process of transforming point clouds into intricate 3D models mark

E N D
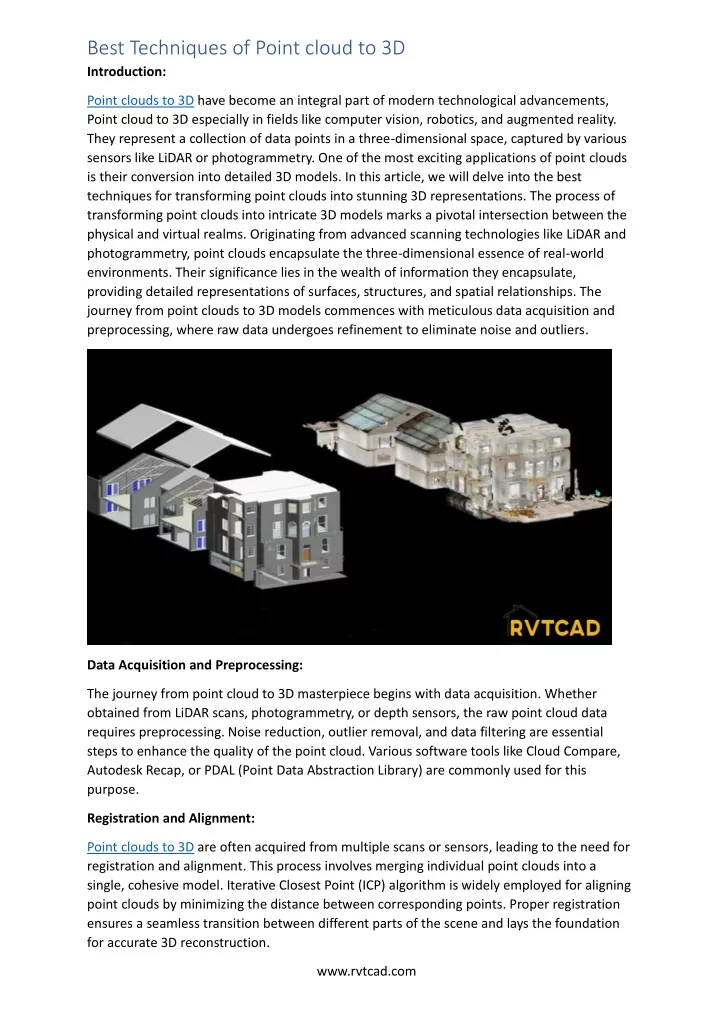
Best Techniques of Point cloud to 3D Introduction: Point clouds to 3D have become an integral part of modern technological advancements, Point cloud to 3D especially in fields like computer vision, robotics, and augmented reality. They represent a collection of data points in a three-dimensional space, captured by various sensors like LiDAR or photogrammetry. One of the most exciting applications of point clouds is their conversion into detailed 3D models. In this article, we will delve into the best techniques for transforming point clouds into stunning 3D representations. The process of transforming point clouds into intricate 3D models marks a pivotal intersection between the physical and virtual realms. Originating from advanced scanning technologies like LiDAR and photogrammetry, point clouds encapsulate the three-dimensional essence of real-world environments. Their significance lies in the wealth of information they encapsulate, providing detailed representations of surfaces, structures, and spatial relationships. The journey from point clouds to 3D models commences with meticulous data acquisition and preprocessing, where raw data undergoes refinement to eliminate noise and outliers. Data Acquisition and Preprocessing: The journey from point cloud to 3D masterpiece begins with data acquisition. Whether obtained from LiDAR scans, photogrammetry, or depth sensors, the raw point cloud data requires preprocessing. Noise reduction, outlier removal, and data filtering are essential steps to enhance the quality of the point cloud. Various software tools like Cloud Compare, Autodesk Recap, or PDAL (Point Data Abstraction Library) are commonly used for this purpose. Registration and Alignment: Point clouds to 3D are often acquired from multiple scans or sensors, leading to the need for registration and alignment. This process involves merging individual point clouds into a single, cohesive model. Iterative Closest Point (ICP) algorithm is widely employed for aligning point clouds by minimizing the distance between corresponding points. Proper registration ensures a seamless transition between different parts of the scene and lays the foundation for accurate 3D reconstruction. www.rvtcad.com
Surface Reconstruction: Once the point clouds are aligned, the next step is to create a surface representation. Various techniques exist for surface reconstruction, with marching cubes and Poisson surface reconstruction being prominent ones. Marching cubes convert the point cloud into a voxel grid, which is then used to generate a polygonal mesh. Poisson surface reconstruction, on the other hand, formulates the problem as a partial differential equation and solves for the surface. Both methods have their strengths and weaknesses, and the choice depends on factors like the density and quality of the point cloud. Mesh Simplification and Refinement: The generated polygonal mesh may be too complex for certain applications, leading to the need for mesh simplification. Simplifying the mesh not only reduces computational load but also makes it more suitable for real-time applications such as virtual reality or gaming. Conversely, refinement techniques aim to enhance the level of detail in the mesh. Balancing simplicity and detail is crucial, and algorithms like Quadric Edge Collapse Decimation and Loop Subdivision are commonly used for these purposes. Texture Mapping: Adding textures to the 3D model is essential for realistic visualization. Texture mapping involves projecting 2D images onto the 3D model, creating the illusion of surface details. UV mapping is a common technique where a 2D texture image is applied to the surface of the 3D model. This process requires careful consideration of the geometry to avoid distortions and ensure accurate texture placement. Post-Processing and Quality Assurance: Post-processing steps are essential to refine the final 3D model further. This involves checking for artifacts, gaps, or inconsistencies in the model and applying corrections. Quality assurance ensures that the 3D model accurately represents the real-world scene. Feedback loops with the original point cloud data may be necessary to make adjustments and improve the overall fidelity of the model. Integration with Visualization Platforms: The ultimate goal of converting point clouds into 3D models is often to integrate them into various visualization platforms. Compatibility with popular 3D modeling software, game engines, or virtual reality environments is crucial. Formats like STEP, STP, IFC, SAT, FBX, STL, DWF, NWC, NWD, OBJ, DWG, DGN, PLN, PLA, DXF, IGES, IGS, 3Ds, glTF are commonly used for exporting 3D models to ensure seamless integration with different applications. Conclusion: Transforming point clouds into 3D masterpieces is a complex yet rewarding process that involves a series of well-defined steps. From data acquisition and preprocessing to surface reconstruction, mesh simplification, texture mapping, and post-processing, each stage contributes to the creation of a visually appealing and accurate representation of the real- world environment. Rvtcad, with its cutting-edge tools and solutions, exemplifies the ongoing synergy between technology and the creative vision, playing a crucial role in shaping the future of 3D modeling across diverse fields, from architecture and urban planning to the realms of virtual reality and gaming. www.rvtcad.com