Download
1 / 15
150 likes | 171 Views
Recursive Triangulation Using Bearings-Only Sensors. G. Hendeby, LiU, Sweden R. Karlsson, LiU, Sweden F. Gustafsson, LiU, Sweden N. Gordon, DSTO, Australia. Motivating Problem. Track a target during close fly-by using bearings only sensors. Known to be difficult to estimate

E N D
Recursive Triangulation UsingBearings-Only Sensors G. Hendeby, LiU, Sweden R. Karlsson, LiU, Sweden F. Gustafsson, LiU, Sweden N. Gordon, DSTO, Australia
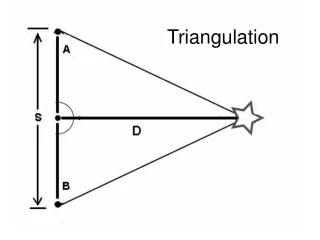
Motivating Problem Track a target during close fly-by using bearings only sensors • Known to be difficult to estimate • Highly nonlinear, especially at short range • Previously used to demonstrate usefulness of new methods • Methods and performance measures will be discussed
Filters The following filters have been evaluated and compared • Local approximation: • Extended Kalman Filter (EKF) • Iterated Extended Kalman Filter (IEKF) • Unscented Kalman Filter (UKF) • Global approximation: • Particle Filter (PF)
Filters: (I)EKF EKF: Linearize the model around the best estimate and apply the Kalman filter (KF) to the resulting system. IEKF: Relinearize the model after a measurement update with a (hopefully) improved estimate, and restart the update with this linear model.
Filters: UKF Simulate carefully chosen “sigma points” to transform involved covariance matrices and use in the KF.
Filters: PF Simulate several possible states and compare to the measurements obtained.
Filter Evaluation Root mean square error (RMSE) • Standard performance measure • Bounded by the Cramér-Rao Lower Bound (CRLB) • Ignores higher order moments Kullback divergence • Compares the distance between two distributions • Captures effects not seen in the RMSE
Test Setup • Measurements from: • Initial estimate: • Initial estimate covariance: • Different target positions along the -axis have been evaluated. • Poor initial information
Test Setup: Measurement Noise • Gaussian noise: • Gaussian mixture noise: • Generalized Gaussian noise:
Test Setup: True Inferred Distribution • True inferred state distribution for one noise realization, • Some non-Gaussian features • Computed using gridding, not feasible for use in practice • CRLB for this situation:
Comparison: RMSE Gaussian mixture noise • The PF is overall best, however CRLB is not reached • (I)EKF sometimes diverges, iterating then could be catastrophic • Difficult to extract information from non-Gaussian measurements • Higher moments are ignored in this comparison Generalized Gaussian noise 50 measurements
Comparison: Kullback divergence The Kullback divergence has been used to capture other differences between estimated and true distribution. Note, the results represents only one realization. Here: Gaussian mixture noise and
Conclusions A bearings-only estimation problem, with large initial uncertainty, has been studied using different filters. As a complement to comparing RMSE, the Kullback divergence has been used to capture more than the variance aspects of the obtained estimates.
Conclusions, cont’d • (Iterated) Extended Kalman Filter – ((I)EKF) • Works acceptable with good initial information, but has difficulties with bad initial information • Iterating often slightly improve performance, but sometimes backfires badly • Unscented Kalman Filter (UKF) • Results are not bad, but not as impressive as suggested in recent literature • Particle Filter (PF) • Works well at the price of higher computational effort