Download
1 / 20
200 likes | 388 Views
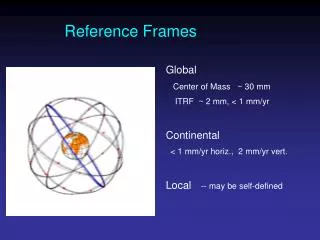
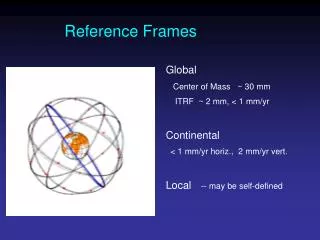
Reference Frames for GPS Applications and Research. Steve Hilla National Geodetic Survey National Ocean Service, NOAA NOAA GNSS Workshop Boulder, Colorado October 24-25, 2007. The Current Picture. GPS has been great for reference frames!

E N D
Reference Frames for GPSApplications and Research Steve Hilla National Geodetic Survey National Ocean Service, NOAA NOAA GNSS Workshop Boulder, Colorado October 24-25, 2007
The Current Picture • GPS has been great for reference frames! • Precise GPS orbits and clocks let users connect at the 1-2 cm level. • Cheaper GPS equipment now distributed globally. • We know the new reference frame origin and site coordinates to ~6 mm. • Better frames make it possible to study global sea level, crustal deformation, etc. • GNSS: more satellites, (soon) better accuracy.
The ITRF • The International Earth Rotation and Reference Systems Service (IERS) is responsible for maintaining the International Terrestrial Reference Frame (ITRF). • Very Long Baseline Inteferometry (VLBI). • Satellite Laser Ranging (SLR). • Global Positioning System (GPS). • Doppler Orbitography Radiopositioning Integrated by Satellite (DORIS).
VLBI DORIS GPS SLR
ITRF2005 Weekly (daily) WRMS Agreement of Weekly (daily) solutions in mm : Solution Type Horizontal WRMS Vertical WRMS VLBI (daily) 2 – 3 5 – 7 SLR 5 – 10 5 – 10 GPS 2 – 3 5 – 6 DORIS 12 – 25 10 – 25
Features of ITRF2005 • ITRF2005 used time series for 4 techniques. • Origin consistent with ITRF2000 at ~6 mm level. Defined by 13 years of SLR. • Scale defined by 26 years of VLBI. • Orientation aligned to ITRF2000 with 70 stas. • Consistent Earth Orientation Parameters. • Composed of 608 stations at 338 sites. • Geocenter time series from SLR and DORIS. • Absolute Rotation Poles for 15 tectonic plates (using 152 sites with error < 1.5 mm/year).
ITRF2005 vs ITRF2000 Transformation Parameters from ITRF2005 to ITRF2000: Tx Ty Tz Scale Rx Ry Rz 0.1 -0.8 -5.8 0.40 0.0 0.0 0.0 mm mm mm ppb mas mas mas Tx´ Ty´ Tz´ Scale´ Rx´ Ry´ Rz´ -0.2 0.1 -1.8 0.08 0.0 0.0 0.0 mm/y mm/y mm/y ppb/y mas/y mas/y mas/y From: “ITRF2005: A new release of the International Terrestrial Reference Frame based on time series of station positions and earth Orientation Parameters”, by Z. Altamimi, X. Collilieux, J. Legrand, B. Garayt, and C. Boucher. Journal of Geophysical Research, Vol. 112, B09401, 2007.
Hierarchy of Reference Frames • ITRF2005: the absolute, long-term datum. • IGS05: GPS-only realization aligned to ITRF2005. • Precise Orbits: allow Precise Point Positioning. • Regional Networks: NSRS/CORS, EUREF, etc. (used for differential positioning). • Other datums through transformations (e.g., ITRF converted to NAD 83 using a 14-parameter Helmert transformation).
International GNSS Service Reference Frame Stations 132 sites define the IGS05 Reference Frame
IGS products http://igscb.jpl.nasa.gov
Upcoming IGS Initiatives • NOAA will host the 2008 IGS Analysis Center Workshop in Miami Beach, June 2-6. • NOAA and four other Analysis Centers will recreate the precise orbits for 1994-2006 in frame IGS05, as well as EOPs, station coordinates and velocities, etc. • During this 2-year effort, NOAA will also reprocess all of the daily CORS data for 1994-2006 to derive IGS05 positions and velocities for all of the CORS (ITRF2000 coordinates will be used until then).
Transformation ParametersITRF00 to NAD 83 (CORS96) Translations: Tx = [0.9956 + 0.0007∙(t – 1997.0)] meters Ty = [-1.9013 – 0.0007∙(t – 1997.0)] meters Tz = [-0.5215 + 0.0005∙(t – 1997.0)] meters Rotations: Rx = [25.915 + 0.067∙(t - 1997.0)]∙k radians Ry = [9.426 - 0.757∙(t - 1997.0)]∙k radians Rz = [11.599 - 0.051∙(t - 1997.0)]∙k radians Scale change: S = 0.62 ppb – 0.18 ppb/year ∙ (t – 1997.0) where t = date in years (eg., 1999.3096 = 23 APR 1999) and k = 4.84813681∙10E-09 (from: http://www.ngs.noaa.gov/CORS/Articles/SolerSnayASCE.pdf)
North American Datum of 1983 NAD 83 • Legal reference system in the United States. • NGS is the responsible agency in the U.S. • First realized in 1986, revised for High Accuracy Reference Networks, revised again for CORS. • Origin is about 2 meters from Earth’s center. • Originally, NAD 83 (1986) was a mostly horizontal reference system. • NAD 83 (CORS96) evolved into a three-dimensional reference system, thanks to GPS.
National Spatial Reference System (NSRS) NOAA’s National Geodetic Survey defines and manages the NSRS – a consistent coordinate system that defines latitude, longitude, height, scale, gravity, and orientation throughout the United States. NSRS comprises a consistent, accurate, and up-to-date national shoreline; a network of continuously operating reference stations (CORS) which supports 3-dimensional positioning activities; a network of permanently marked points, and a set of accurate models describing dynamic, geophysical processes that affect spatial measurements.
World Geodetic System of 1984 WGS 84(G1150) • GPS broadcast orbits in WGS 84 (+/- 1.6 meters). • Department of Defense is responsible agency. • System originally agreed with NAD 83. • System now agrees with ITRF2000 at the 1 cm level. • Supports stand-alone positioning. • Does not support high-precision differential positioning (data and reference station coordinates not readily available).
Conversion Programs • OPUS will use ITRF2000, to add UTM, State Plane Coordinates, and U.S. National Grid. • Horizontal Time Dependent Positioning (HTDP) will convert ITRFxx ↔ NAD 83 and predict horizontal velocities. • Geoid03 used to convert NAD 83 ellipsoid heights to NAVD88 orthometric heights. • VDATUM will convert ITRFxx ↔ NAD83, NGVD29 ↔ NAVD88, Tidal Datums (MLW, MLLW) to MSL, and between any of the above, for a finite set of locations where hydrodynamic models have been developed.
Future ITRF Considerations • Improve the GLONASS tracking network. • Model geocenter motion. • Improve site ties. • Model atmospheric loading, and higher order ionospheric delay corrections. • New receivers for L5/GPS, CDMA/GLONASS, Galileo, and COMPASS. • Future ITRFs may include models for real time deformation due to geocenter motion (spherical harmonics to degree/order 6).
GLONASS Tracking Sites Only ~10 SITES in the Southern Hemisphere