Download
1 / 25
410 likes | 809 Views
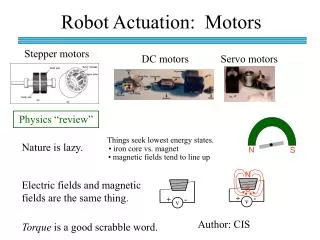
Motors & Motor Drivers. ECE 450. AC or DC Motors. AC Few robots use AC except in factories Most of those that use AC first convert to DC DC Dominates in robotics Must be bidirectional. DC Motor Types. Continuous-duty (run continuously when power supplied) Brushed Brushless Servo

E N D
Motors & Motor Drivers ECE 450
AC or DC Motors • AC • Few robots use AC except in factories • Most of those that use AC first convert to DC • DC • Dominates in robotics • Must be bidirectional
DC Motor Types • Continuous-duty(run continuously when power supplied) • Brushed • Brushless • Servo • Intermittent-duty(power must be pulsed to run continuously) • Stepper Motors
Motor Specifications • Operating voltage • Current draw • Speed • Torque • Stalling or Running Torque
DC Motor: Brush Motors The most common. Toys, battery powered tools, electric machines. Stator (permanent magnets) Brushes
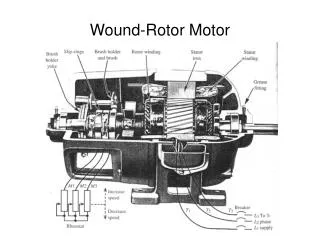
Brush DC Motors • Identify: • Stator • Rotor • Brushes • Commentator http://mot-sps.com/motor/tutorial/blac.html
Pulse Width Modulation (PWM) Centered PWM
Brushless DC Motor • Identify: • Permanent Magnets • Rotor • Brushes • Commentator http://mot-sps.com/motor/tutorial/blac.html
Brushless DC Motor 1 6 6 2 3 5 4 • Housing • Laminated steel stack • Winding • Permanent magnet • Shaft • Ball bearing Less common. Higher efficiency, less friction, less electrical noise. Requires electronic driver.
DC Servo Motor A DC Servo Motor is a DC Motor with Gears and Electronics with limited angular rotation (typically 90, 180 or 360º) • Why the addition of gears? • Nylon • Karbonite • Metal • Why electronics? • Digital • Analog http://www.societyofrobots.com/actuators_servos.shtml
DC Servo Motor 1 1.00 ms: 0 degrees 2.00 ms 1.50 ms 1.00 ms 0.50 ms 0.00 ms 0 1 2.00 ms 1.50 ms 1.00 ms 0.50 ms 0.00 ms 1.50 ms: Neutral 0 1 2.00 ms 1.50 ms 1.00 ms 0.50 ms 0.00 ms 0 2.00 ms: 180 degrees Requires constant pulsing ( 50 times / second) http://www.seattlerobotics.org/guide/servos.html
Stepper Motor Very common. Required driver. Very strong, when not rotating. Easy to control rotor position. Full Step Half Step http://mot-sps.com/motor/tutorial/blac.html
Full-Step Stepper Motor 1 1 1 1
Half-Step Stepper Motor 1 1 1 1 1
Motor DriversSimple, 1- dc motor (brushes), on/off driver +9 V M1 DC Brush D1 1N5817 (Schottky) M C Q1 2222A (NPN) B On: to +9 V Off: to GND or disconnected R1 1 k E
Transistors C B E C B E PNP Bipolar Transistor NPN Bipolar Transistor http://www.kilowattclassroom.com/Archive/AN0007.pdf
Motor DriversSimple, 1-motor, on/off driver +9 V R2 1 k E On: to GND or disconnected Off: to +9 V Q2 2907A (PNP) B C M1 DC Brush D1 1N5817 (Schottky) M
Motor DriversClassic Bipolar H-Bridge On: to GND or disconnected Off: to +9 V On: to GND or disconnected Off: to +9 V +9 V +9 V R4 1 k R2 1 k E E D2 1N5817 (Schottky) D4 1N5817 (Schottky) B B C Q4 2907A (PNP) C Q2 2907A (PNP) M Q3 2222A (NPN) Q1 2222A (NPN) M1 DC Brush R1 1 k R3 1 k C C D1 1N5817 (Schottky) D3 1N5817 (Schottky) B B E E On: to +9 V Off: to GND or disconnected On: to +9 V Off: to GND or disconnected Taken from Intermediate Robot Building by David Cook
Motor DriversClassic Bipolar H-Bridge 4427 1 8 NC NC 2 7 IN A OUT A 3 6 GND VDD 4 5 IN B OUT B +9 V R4 1 k R2 1 k E E D2 1N5817 (Schottky) D4 1N5817 (Schottky) B B C Q4 2907A (PNP) C Q2 2907A (PNP) from microcontroller M GND Q3 2222A (NPN) Q1 2222A (NPN) from microcontroller M1 DC Brush R1 1 k R3 1 k C C D1 1N5817 (Schottky) D3 1N5817 (Schottky) B B E E Taken from Intermediate Robot Building by David Cook
Motor DriversTypical H-Bridge Motor Driver +5 VDC 220 F 0.1 F SN754410 Disconnected or from microcontroller 1 16 VLOGIC ENABLE A&B From microcontroller From microcontroller 2 15 INPUT C INPUT A 3 14 OUTPUT C OUTPUT A M M 4 13 M1 DC Brush M2 DC Brush GND GND 5 12 GND GND 6 11 OUTPUT D OUTPUT B OUT B from microcontroller From microcontroller 7 10 INPUT D INPUT B +4.5 to +36 VDC Disconnected or from microcontroller 8 9 ENABLE C&D VMOTOR 220 F 0.1 F Taken from Intermediate Robot Building by David Cook
H-Bridge LabComponents • Construct the H-Bridge as shown using components from your Robotics Kit. • Identify those configurations that short circuit the H-Bridge and on the enclosed table enter “Short Circuit” under the Results column • Show this table to either the Instructor or the TA before proceeding any further. • Using your H-Bridge, determine how the motor performs under each of the 16 different combinations of the four transistors • DO NOT verify the short circuit combinations identified earlier! • Pay attention to the transistor numbering in the table compared to the schematic. • Be sure to identify whether or not the motor turns clockwise or counterclockwise • For any breaking actions, identify which direction the motor is turning when breaking occurs. (In some configurations, breaking only occurs when the motor is turning in one direction but not the other.) • Lab Report • To drive larger motors, an H-Bridge with higher capacity currents would be required. Using the components in this lab, determine the component(s) that limit the current for driving a dc motor. Describe your analysis and results in your lab report. • Include the table showing your results for the 16 different combinations for powering the H-Bridge.
Motor DriversClassic Bipolar H-Bridge On: to GND or disconnected Off: to +9 V On: to GND or disconnected Off: to +9 V +9 V +9 V R4 1 k R2 1 k E E D2 1N5817 (Schottky) D4 1N5817 (Schottky) B B C Q4 2907A (PNP) C Q2 2907A (PNP) M Q3 2222A (NPN) Q1 2222A (NPN) M1 DC Brush R1 1 k R3 1 k C C D1 1N5817 (Schottky) D3 1N5817 (Schottky) B B E E On: to +9 V Off: to GND or disconnected On: to +9 V Off: to GND or disconnected Taken from Intermediate Robot Building by David Cook