Download

1 / 5
50 likes | 415 Views
TEAADS CyPhy Test Environment for ADAS and Autonomous Driving Systems Dr . Helmut Kokal, AVL List GmbH helmut.kokal@avl.com Automotive. Market relevance:

E N D
TEAADS CyPhyTest Environment for ADAS and Autonomous Driving Systems Dr. Helmut Kokal, AVL List GmbH helmut.kokal@avl.com Automotive
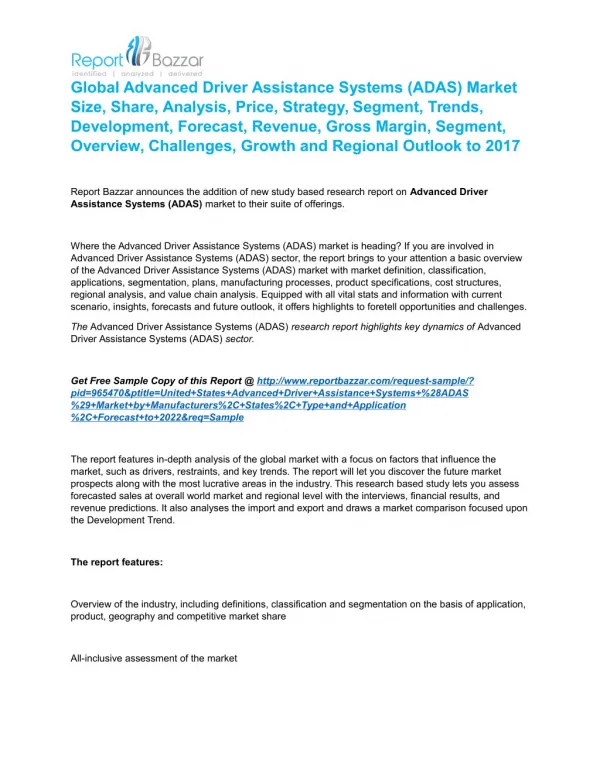
Market relevance: • Increasing extension of driver assistance systems in vehicles up to autonomous driving rises the need of automated test tools for cy-phy systems • Highly tested safety functionality and reliability of automotive cy-phy systems such as ADAS and autonomous driving systems • Guaranteeefficiencyandemissionbytheuseof ADAS and aut. drivingsystems • Legislation, driver acceptance and social acceptance are mandatory for successful establishing ADAS and autonomous driving • Innovation: • Automated and reproducible testing of ADAS and autonomous driving systems • Business impact: • More reliable and efficient testing of cy-phy systems • Reduction of costs as disastrous consequences of road traffic accidents
GPS stimulationsimulation (Rest) Vehicle + powertainsimulation Driver simulation TorqueStimuli &Simulation Video Stimuli &Simulation Navi Track simulation Autom.Driving VCU Test generator Radar Stimuli • &Simulation ECU TCU ECU Environment + trafficconditionsimulation (fog, night, rain, snow, trafficjam, ..) Ultrasonic Stimuli • &Simulation Lidar • Stimuli • &Simulation Maneuversandtest Low speedManoever (Park,. Higher speed (ACC, laneass,…) V2V + I2V simulation
WP-Requirements, Test Methodology Legislation Legal checks SocialAcceptance Driver Acceptance Driveability, Usability Maneuversselection Test generation WP-xCU Functions & Dev. WP-Test Environment WP-Simulation Environment SIL/MIL HiL, Traffic simulation, Vehiclesimulation, Test Environment xCU for ADAS and autonomousdriving HIL xIL WP-Sensors Sensor stimuli and/or Sensor simulation Sensors for ADAS and autonomousdriving Integration
Other potential partners • Conti (DE), PTV (DE),