Download
1 / 1
10 likes | 109 Views
Bayesian Cognitive Models for 3D Structure and Motion Multimodal Perception Multimodal Perception Systems 01/01/2006 - 31/12/2009. Goals

E N D
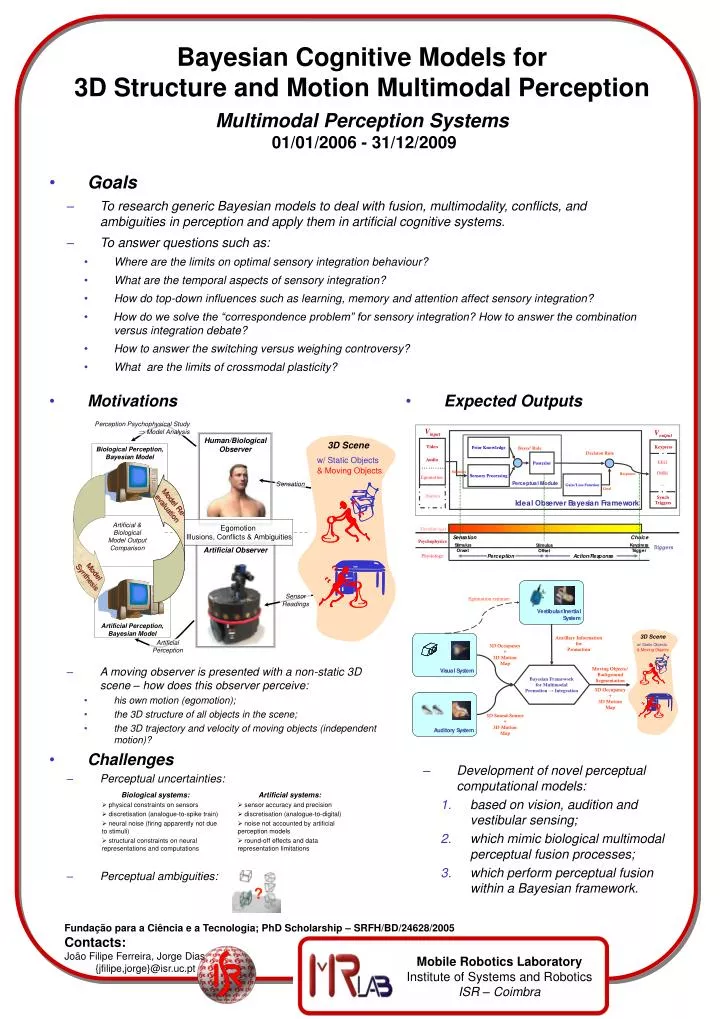
Bayesian Cognitive Models for3D Structure and Motion Multimodal PerceptionMultimodal Perception Systems 01/01/2006 - 31/12/2009 • Goals • To research generic Bayesian models to deal with fusion, multimodality, conflicts, and ambiguities in perception and apply them in artificial cognitive systems. • To answer questions such as: • Where are the limits on optimal sensory integration behaviour? • What are the temporal aspects of sensory integration? • How do top-down influences such as learning, memory and attention affect sensory integration? • How do we solve the “correspondence problem” for sensory integration? How to answer the combination versus integration debate? • How to answer the switching versus weighing controversy? • What are the limits of crossmodal plasticity? • Motivations • A moving observer is presented with a non-static 3D scene – how does this observer perceive: • his own motion (egomotion); • the 3D structure of all objects in the scene; • the 3D trajectory and velocity of moving objects (independent motion)? • Challenges • Perceptual uncertainties: • Perceptual ambiguities: • Expected Outputs • Development of novel perceptual computational models: • based on vision, audition and vestibular sensing; • which mimic biological multimodal perceptual fusion processes; • which perform perceptual fusion within a Bayesian framework. Biological systems: • physical constraints on sensors • discretisation (analogue-to-spike train) • neural noise (firing apparently not due to stimuli) • structural constraints on neural representations and computations Artificial systems: • sensor accuracy and precision • discretisation (analogue-to-digital) • noise not accounted by artificial perception models • round-off effects and data representation limitations Fundação para a Ciência e a Tecnologia; PhD Scholarship – SRFH/BD/24628/2005 Contacts: João Filipe Ferreira, Jorge Dias {jfilipe,jorge}@isr.uc.pt