Download
1 / 56
560 likes | 828 Views
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 26, NO. 9, SEPTEMBER 2004. An Experimental Comparison of Min-Cut/Max-Flow Algorithms for Energy Minimization in Vision. Yuri Boykov , Member, IEEE Vladimir Kolmogorov , Member, IEEE. Guan-Yu Liu. Outline. Introduction

E N D
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 26, NO. 9, SEPTEMBER 2004 An Experimental Comparison ofMin-Cut/Max-Flow Algorithms forEnergy Minimization in Vision • Yuri Boykov, Member, IEEE • Vladimir Kolmogorov, Member, IEEE • Guan-Yu Liu
Outline • Introduction • Overview • Method • A : growth • B : augmentation • C : adoption • Experimental Results • Part1 - introduce algorithm • Part2 - results • Conclusion • Reference • Q & A
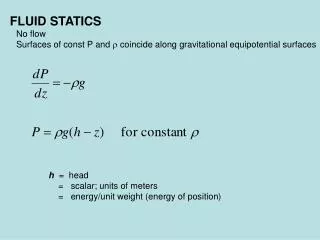
Introduction(1/3) • GREIG et al. [15] were the first to discover that powerful min-cut/max-flow algorithms from combinatorial optimization can be used to minimize certain important energy functions in vision. • 123 • where L = is a labeling of image , is a data penalty function, is an interaction potential, and is a set of all pairs of neighboring pixels. [15] D. Greig, B. Porteous, and A. Seheult, “Exact Maximum A Posteriori Estimation for Binary Images,” J. Royal Statistical Soc., Series B, vol. 51, no. 2, pp. 271-279, 1989.
Introduction(2/3) • Algorithm • Dinic’s algorithm [14] • Push-Relabel algorithm with the queue-based selection rule [12] • Push-Relabel algorithm with the highest level selection rule [12] [14] E.A. Dinic, “Algorithm for Solution of a Problem of Maximum Flow in Networks with Power Estimation,” Soviet Math. Dokl., vol. 11, pp. 1277-1280, 1970. [12] A.V. Goldberg and R.E. Tarjan, “A New Approach to the Maximum-Flow Problem,” J. ACM, vol. 35, no. 4, pp. 921-940, Oct. 1988.
Introduction(3/3) • This paper use Min-Cut/Max-Flow to find minimum energy. • Image Restoration • Potts model • Linear interaction • Stereo • Pixel-Labeling stereo with the Potts model • Stereo with occlusion • Multi-camera scene reconstruction • Segmentation
Overview(1/9) B 9 2 D A 9 2 C
Overview(2/9) B 9 2 D T S A Sink Source 9 2 C
Overview(3/9) 2 B 9 2 D T S A 9 2 C 2
Overview(4/9) B 2/9 2/2 D T S A 2/9 2/2 C
Overview(5/9) • There are two basic way to search max-flow • Breadth-first search(BFS) • Push • A typical augmenting path algorithm stores information about the distribution of the current s→t flow f among the edges of G using a residual graph Gf. The topology of Gf is identical to G, but the capacity of an edge in Gf reflects the residual capacity of the same edge in G given the amount of flow already in the edge.
Overview(6/9) B 9 2/2 D T S A 2/2 9 2/2 C
Overview(7/9) B 9 2/2 2 2 D T S A 2 2/2 9 2/2 C
Overview(8/9) B 2/9 2/2 2 2/2 D T S A 2 2/2 2/9 2/2 C
Overview(9/9) • There are three steps on the proposed algorithm. • A : growth • B : augmentation • C : adoption
Method • A : growth • search trees S and T grow until they touch giving an s→t path • B : augmentation • the found path is augmented, search tree(s) break into forest(s) • C : adoption • trees S and T are restored.
Method.A(1/3) • At the growth stage, the search trees(s and t) expand. The active nodes explore adjacent nonsaturated edges and acquire new children from a set of free nodes. • Active node • Passive node • Free node
Method.A(2/3) • The growth stage terminates if an active node encounters a neighboring node that belongs to the opposite tree.
Method • A : growth • search trees S and T grow until they touch giving an s→t path • B : augmentation • the found path is augmented, search tree(s) break into forest(s) • C : adoption • trees S and T are restored.
Method.B(1/3) • The augmentation stage augments the path found at thegrowth stage. Since we push through the largest flowpossible, some edge(s) in the path become saturated. • Orphan node
Method.B(3/3) • The nodes that become orphan nodes keep their original own parents. • Change another parent • Become free nodes
Method • A : growth • search trees S and T grow until they touch giving an s→t path • B : augmentation • the found path is augmented, search tree(s) break into forest(s) • C : adoption • trees S and T are restored.
Method.C(1/3) • The goal of the adoption stage is to restore the single-tree structure of sets S and T with roots in the source and the sink. • Try to find a new valid parent for each orphan. • A new parent should belong to the same set, S or T, as the orphan. • If there is no qualifying parent, we remove the orphan from S or T and make it a free node. • Also declare all its former children orphans.
Method.C(3/3) • The stage terminates when no orphans are left and, thus, the search tree structures of S and T are restored. Since some orphan nodes in S and T may become free, the adoption stage results in contraction of these sets.
Method.conclusion • After the adoption stage is completed, the algorithm returns to the growth stage. The algorithm terminates when the search trees S and T cannot grow (no active nodes) and the trees are separated by saturated edges. This implies that a maximum flow is achieved.
Experimental Results.part1 • A : Dinic’s algorithm • B : Push-Relabel algorithm with the queue-based • C : Push-Relabel algorithm with the highest level
Experimental Results.part1 • A : Dinic’s algorithm • B : Push-Relabel algorithm with the queue-based • C : Push-Relabel algorithm with the highest level
Experimental Results.B(1/1) • To push water from source to sink. • Every node can store water temporally. • Terminate when bottleneck.
Experimental Results.part1 • A : Dinic’s algorithm • B : Push-Relabel algorithm with the queue-based • C : Push-Relabelalgorithm with the highest level
Experimental Results.C(1/1) • Improved queue-based • Set height levels to avoid water flow back
Experimental Results.part2 • A : Image Restoration • Potts model • Linear interaction energy • B : Stereo • Pixel-Labeling stereo with the potts model • Stereo with occlusion • Multi-camera scene reconstruction • C : Segmentation
Experimental Results.A(1/4) • Potts model • 123 • Linear interaction • 1 • Reference • [2] , [4] , [8] , [15] , [18] , [21] , [32] , [36] , [38]
Experimental Results.part2 • A : Image Restoration • Potts model • Linear interaction energy • B : Stereo • Pixel-Labeling stereo with the Potts model • Stereo with occlusion • Multi-camera scene reconstruction • C : Segmentation
Experimental Results.B(1/6) • Potts model • 1 • Stereo with occlusion • 1 • Reference • [4] , [7] , [23] , [24]
Experimental Results.B(4/6) • Multi-camera scene reconstruction • 1 • 1 • 1 • The smoothness term is the sum of Potts energy terms over all cameras. • The visibility term is infinity if a configuration f violate the visibility constraint and zero otherwise.
Experimental Results.part2 • A : Image Restoration • Potts model • Linear interaction energy • B : Stereo • Pixel-Labeling stereo with the potts model • Stereo with occlusion • Multi-camera scene reconstruction • C : Segmentation
Experimental Results.C(1/4) • Potts model • 123 • Reference • [3] , [5] , [28] , [29] , [33] , [35]