Download
1 / 49
500 likes | 641 Views
Time-Based Voronoi Diagram. D. T. Lee Institute of Information Science Academia Sinica, Taipei, Taiwan. dtlee@iis.sinica.edu.tw. Jointly with C. S. Liao, W. B. Wang, IIS. Outline . Introduction Preliminaries Good intersection condition General condition Conclusion.

E N D
Time-Based Voronoi Diagram D. T. LeeInstitute of Information Science Academia Sinica, Taipei, Taiwan dtlee@iis.sinica.edu.tw Jointly with C. S. Liao, W. B. Wang, IIS.
Outline • Introduction • Preliminaries • Good intersection condition • General condition • Conclusion
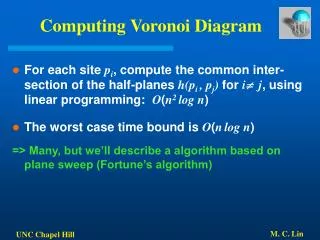
Multiple Highways Model • Input: A set S of points, S={p1, …, pn} in the plane and k highways L1, …, Lk, modeled as lines. • Travelers can enter the highways at any point and move along Li at speed vi in both directions. • Off the highways travelers can move freely in any direction at speed v0<<v1,…, vk. • Output: A Voronoi diagram for the input based on traveling time, i.e. Time-based Voronoi Diagram
Time Distance • Given two points p, q in the plane, the shortest time pathspt(p, q) is a path that takes the shortest time traveling between p to q. • The time distancedt(p, q) between p and q is the time required to follow any shortest time paths between p and q.
One Highway Problem • Abellanas, Hurtado, Sacristan, Icking, Ma, Klein, Langetepe, Palop IPL, 2003 • Assumption • L1 lies on the x-axis. • sine = v0/v1 = 1/v1 • L1+: the half-plane above L1 • L1-: the half-plane below L1
Where to Enter the Highway p sine = v0/v1 = 1/v1 α q pl pr L1 α
Time Distance q p L1 pr ql α pL1
Terminology • : the symmetric point of p reflecting by L1. • Given a site p, let be the half-ray with endpoint p and of slope tan (-tan ) respectively.
q p L1
q L1 p
Approach • Transform the 1-highway problem into another problem in time distance. • If q and p are on the same side, the time distance between q to p must be one of the Euclidean distances from q to • Otherwise, the time distance between q to p must be one of the Euclidean distances from q to
Vor() & Vort() • Vor(x, X): the Euclidean Voronoi Region of a site or a line xX with respect to the set X. • Vort(x, X): the time-based Voronoi Region of a site or a line xX with respect to the set X.
Theorem [Abellanas, et al.] • For p L+ • For p L-
Envelope & Objects Involved The Voronoi diagram above L1 The envelope of the objects below L1
Two Highways Problem • O is the intersection of L1 and L2 • is the angle between L1 and L2 • is the union of and for L1 • is similarly defined for L2 • Four “quadrants” Q0, Q1, Q2, Q3
L2 L1 O Q1 Q0 Q2 Q3
Two Highways • Lemma 3.1 • SupposeL1 + L2 = , for two points p, q on different highways. • The shortest time paths are not unique. • One of the shortest time paths from p to q is to walk along one highway then change to the other at the intersection.
Two Highways q L2 L1 p
Two Highways • Lemma 3.2 • SupposeL1 + L2 < , for two points p, q on different highways. • The shortest time path from p to q is to walk along one highway then change to the other at the intersection.
Two Highways q B A L2 L1 C D p
Two Highways • Lemma 3.3 • SupposeL1 + L2 > , for two points p, q on different highways. • The shortest time path from p to q is to walk along at most one highway. (shortcut)
q3 q2 q1 Two Highways L2 L2 L1 p L1
Good Condition for Highway Intersection • Highways L1, L2 are said to satisfy good intersection condition if and only if L1 + L2 . • Any shortest time path connecting two points on different highways that satisfy good intersection condition contains no shortcut.
O-Domination Site • pO is the O-domination site if • O is in the Voronoi region of O-domination site pO
L2 Q0 Q1 L1 O Q2 Q3 -Distance-Line-from-O
O-Domination Line • The -distance-line-from-O, , is called O-domination line in Qi,where = dt(O, pO).
Trivial Site • Any site which is not the O-domination site is a trivial site
Some Properties • For a point qVort(p, S), if the shortest time path from q to p passes through O, then the site p is the O-domination site. • For a point qVort(p, S), if the shortest time path from q to p enters both highways, the path must pass through O provided that the two highways satisfy good intersection condition.
Some Properties (cont’d) • For a point qVort(p, S), and p is a trivial site, then the q to p path never enters both highways. • For a trivial site p in Qi,Vort(p, S) Q(i+2) mod 4 = • We need not consider trivial sites in Qi when we compute the Voronoi diagram in Q(i+2) mod 4
Li+ Q(i+1) mod 4 Qi Li- Q(i-1) mod 4 Notations • Let Li+ be the line that borders quadrant Qi and Q(i+1) mod 4, and Li- borders quadrant Qi and Q(i-1) mod 4
Good Condition Case • The time-based Voronoi diagram in Qi, is determined by the set of objects Pi:
Envelope & Objects Involved Li- Li+ O
Time-Based Voronoi Diagram • The time-based Voronoi diagram in a quadrant Qi is • The time-based Voronoi diagram is • It is our general form.
Algorithm • Find the O-domination site pO and let=dt(O, pO) • Compute the O-domination line for Qi, i=0,1,2,3 • Compute the set Pi of objects used for constructing the Voronoi diagram in each quadrant Qi for i=0,1,2,3. i.e, the envelope surrounding Qi, and all the sites in Qi • Compute the ordinary Voronoi diagram in Qi. i.e, Vor(Pi) Qi • For all sites p, collect all regions associated with ,and p
Theorem • The Voronoi diagram for a set S of n sites in the presence of two highways L1 and L2 in the plane that satisfy the good intersection condition, can be computed in O(n log n) time.
Multiple Highways Problem • Idea • If good intersection condition holds, the problem is not hard. • Find domination site for each intersection. • In each cell of the arrangement, only the sites in the cell and neighboring cells determine the time-based Voronoi diagram in the cell.
How to Find Domination Sites? • Insert highways one at a time in order of non-descending speeds. • Rewrite and update intersection domination sites. • Propagation subroutine.
Time Complexity • n sites, k highways • To determine all intersection-domination sites with propagation costs O(kn + k3 log k) time • To compute all time-based Voronoi region costs O(n log n) time • The total time is O(kn + k3 log k + n log n)
Two-Highway Model in General • No good condition now. • Lemma 5.1 • Let p, q be any two points on the plane. If the number of shortest time path from p to q is finite, and the shortest time path walks along both highways, then the path must pass through the intersection of two highways.
Two-Highway Model in General (cont’d) • The time-based Voronoi diagram in Qi, is determined by the set of objects Pi:
Time-Based Voronoi Diagram • The time-based Voronoi diagram in a quadrant Qi is • The time-based Voronoi diagram is • The time-based Voronoi diagram for n points in the presence of two highways can be computed in O(n log n) time.
Special Cases • Two parallel highways
Two Parallel highways Problem • Idea • No origin-domination site • No shortest time path along both highways • Compute the envelope associated with a proper set of hats
qL1 qL2 Two Parallel Highways Problem p q L1 L2
L2 L1+ • L1 nullifies L2 • No shortest time path along both highways • We solve the problem as in two parallel highways case.
L2 L1+ p L2 O L1
General Multiple Highways Case • Hard to determine the shortest time path • Hard to determine the intersection domination sites • Propagation doesn’t work • OPEN?
Conclusion • n sites, k highways • If good intersection condition holds, we can solve the problem inO(k3 log k + kn + n log n) time • If good intersection condition doesn’t hold, we can solve two highways problem inO(n log n) time.