Download
1 / 14
140 likes | 413 Views
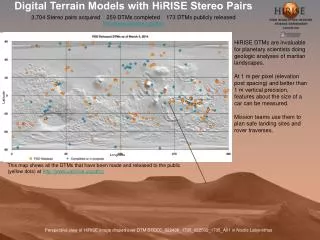
Stereo models. Algebraic models for stereo. General stereo environment.

E N D
Stereo models Algebraic models for stereo CSE 803 Stockman Fall 2008
General stereo environment A world point P seen by two cameras must lie at the intersection of two rays in space. (The algebraic model is 4 linear equations in the 3 unknowns x,y,z, enabling solution for x,y,z.) It is also common to use 3 cameras; the reason will be seen later on. CSE 803 Stockman Fall 2008
Baseline stereo: carefully aligned cameras CSE 803 Stockman Fall 2008
Computing (x, y, z) in 3D from corresponding 2D image points CSE 803 Stockman Fall 2008
2 calibrated cameras view the same 3D point at (r1,c1)(r2,c2) CSE 803 Stockman Fall 2008
Compute closest approach of the two rays: use center point V Shortest line segment between rays CSE 803 Stockman Fall 2008
Connector is perpendicular to both imaging rays CSE 803 Stockman Fall 2008
Geometric interpretation • Create a plane perpendicular to ray P; it can slide along the ray. All lines normal to ray P are in this plane. • Create a plane perpendicular to ray Q; it can slide along the ray. All normals to ray Q are in this plane. • Slide the planes and find that shortest line segment simultaneously in both planes. CSE 803 Stockman Fall 2008
Solve for the endpoints of the connector Scaler mult. Fix book CSE 803 Stockman Fall 2008
How to find points Pj and Qj ? • We assume ray P originates at some fixed image point [r, c]. • The camra matrix is known. • Ray P is defined by 2 linear equations in 3 unknowns [WPx ,WPy,WPZ] • Create a plane perpendicular to ray P; it can slide along the ray. • Pick some plane, say WPZ = 20 and solve for the other two 3D coordinates where the ray P pierces this plane. • Make sure that the ray is not parallel to the picked plane! • Repeat this process to get two points on ray P and two points on ray Q; making sure to use the second camera matrix and second image point for Q. CSE 803 Stockman Fall 2008
Correspondence problem is most difficult aspect • Can use interest points and cross correlation • Can limit search to epipolar line • Can use symbolic matching (Ch 11) to determine corresponding points (called structural stereopsis) • apparently humans don’t need ss CSE 803 Stockman Fall 2008
Epipolar constraint With aligned cameras, search for corresponding point is 1D along corresponding row of other camera. So, the match for P1 in image I2 must be along a given row. CSE 803 Stockman Fall 2008
Epipolar constraint for non baseline stereo computation Need to know relative orientation of cameras C1 and C2 If cameras are not aligned, a 1D search can still be determined for the corresponding point. P1, C1, C2 determine a plane that cuts image I2 in a line: P2 will be on that line. CSE 803 Stockman Fall 2008
Measuring driver body position 4 cameras were used to measure driver position and posture while driving: 2mm accuracy achieved CSE 803 Stockman Fall 2008