Download
1 / 25
250 likes | 469 Views
Chapter 3 Determinants and Matrices. September 14 Determinants 3.1 Determinants. Fundamental definition :. Notes for each term in det A : Each row has only one number. Each column has only one number. The sign is given by the permutation. Levi-Civita symbol :.

E N D
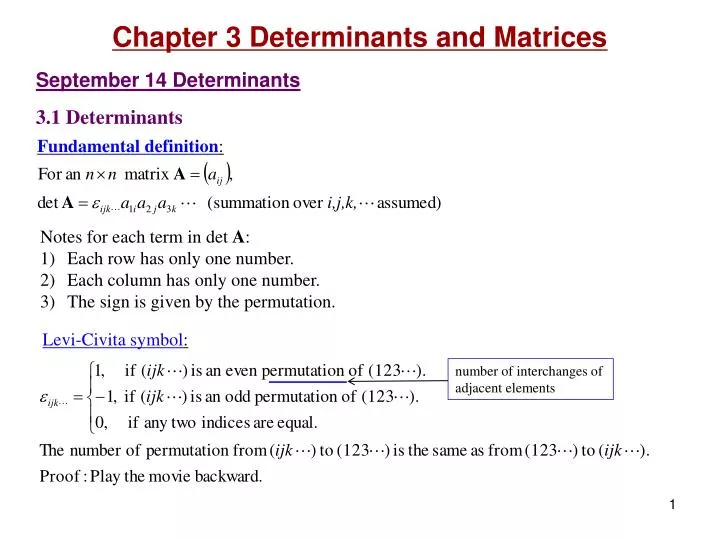
Chapter 3 Determinants and Matrices September 14 Determinants 3.1 Determinants Fundamental definition: • Notes for each term in det A: • Each row has only one number. • Each column has only one number. • The sign is given by the permutation. Levi-Civita symbol: number of interchanges of adjacent elements
Development by minors (an iterative procedure): Minor A(i,j): A reduced array from A by removing the ith row and the jth column. Expanding along a row Expanding along a column CofactorCij: • Useful properties of determinants: • A common factor in a row (column) may be factored out. • Interchanging two rows (columns) changes the sign of the determinant. • A multiple of one row (column) can be added to another row (column) without changing the determinant. • These properties can be tested in the triple product of
Homogeneous linear equations: The determinant of the coefficient matrix must be zero for a nontrivial solution to exist. Inhomogeneous linear equations:
Linear independence of vectors: A set of vectors are linearly independent if the only solution for is Gram-Schmidt orthogonalization: Starting from n linearly independent vectors we can construct an orthonormal basis set
Read: Chapter 3: 1 Homework: 3.1.1,3.1.2 Due: September 23
September 16,19 Matrices 3.2 Matrices Definition: A matrix is a rectangular array of numbers. Terminology: row, column, element (entry), dimension, row vector, column vector. Basic operations: Addition: Scalar multiplication: Transpose: • Elementary row (column) operations: • Row switching. • Row multiplication by a number. • Adding a multiple of a row to another row. Rank: The maximal number of linearly independent row (or column) vectors is called the row (or column) rank of the matrix. For any matrix, row rank equals column rank. Proof (need more labor): 1) Elementary row operations do not change the row rank. 2) Elementary row operations do not change the column rank. 3) Elementary row operations result in an echelon form of matrix, which has equal row and column ranks.
Matrix multiplication: In the view of row (or column) vectors: The kth row of C is a linear combination of all rows of B, each weighted by an element from the kth row of A. (Similarly by taking the transpose)The kth column of C is a linear combination of all columns of A, each weighted by an element from the kth column of B.
Direct product: Diagonal matrices: Trace:
Matrix inversion: Gauss-Jordan method of matrix inversion: Let MLA=1 be the result of a series of elementary row operations on A, then Example:
Read: Chapter 3: 2 Homework: 3.2.1,3.2.31,3.2.34,3.2.36 Due: September 23
September 21 Orthogonal matrices 3.3 Orthogonal matrices Change of basis (rotation of coordinate axes): Orthogonal transformation: (orthonormal transformation) preserves the inner product between vectors: Orthogonality conditions: Other equivalent forms:
Orthogonal matrix: • An orthogonal matrix preserves the inner product of vectors. • The determinant of any orthogonal matrix is +1 (rotation) or −1 (rotation + inversion). • All 3 ×3 orthogonal matrices form an orthogonal group O(3). Its subgroup SO(3) (special orthogonal group) consists of the orthogonal matrices with determinant +1. Similarity transformation: The matrix representation of an operator depends on the choice of basis vectors. Let operator A rotate a vector: B change the basis (coordinate transformation): Question: A′ and A are called similar matrices. They are the representation of the same operator in different bases.
Read: Chapter 3: 3 Homework: 3.3.1,3.3.8,3.3.9,3.3.10,3.3.14 Due: September 30
September 23,26 Diagonalization of matrices 3.4 Hermitian matrices and unitary matrices Complex conjugate: Adjoint: Hermitian matrices: Unitary matrices: Inner product: Conjugate transpose. Sometimes A* in math books. Self-adjoint. Symmetric matrices in real space. Orthogonal matrices in real space. The inner product of vectors x and y is Unitary transformation: A unitary transformation preserves the inner product of complex vectors: Orthogonality conditions:
3.5 Diagonalization of matrices Example: Diagonization of the moment of inertia. Angular momentum of a rigid body rotating around the origin. Let us consider one mass element m (I mean dm) inside the rigid body. The actual angular momentum takes the integration form. We can rotate the coordinates so that the moment of inertia matrix I is diagonalized in the new coordinate system. If the angular velocity is along a principle axis, the angular momentum will be in the same direction as the angular velocity .
Eigenvalues and eigenvectors: For an operator A, if there is a nonzero vectors x and a scalar l such that then x is called an eigenvector of A, and l is called the corresponding eigenvalue. A only changes the “length” of its eigenvector x by a factor of eigenvalue l, without affecting its “direction”. For nontrivial solutions, we need This is called the secular equation, or characteristic equation. Example: Calculate the eigenvalues and eigenvectors of
Eigenvalues and eigenvectors of Hermitian matrices: • The eigenvalues are real. • The eigenvectors associated with different eigenvalues are orthogonal. • Physicists like them. • Proof:
Read: Chapter 3: 4-5 Homework: 3.4.4,3.4.5,3.4.7,3.4.8,3.5.6,3.5.8,3.5.9,3.5.12,3.5.27 Due: September 30
September 28 Normal matrices 3.6 Normal matrices Normal matrices: 1) A and A+ have the same eigenvector, but with conjugated eigenvalues. Proof: 2) The eigenvectors of a normal matrix are orthogonal. Proof:
More about normal matrices: • Hermitian matrices and unitary matrixes are both normal matrices. However, it is not the case that all normal matrices are either unitary or Hermitian. • A normal matrix is Hermitian (self-adjoint) if and only if its eigenvalues are real.A normal matrix is unitary if and only if its eigenvalues have unit magnitude. • Every normal matrix can be converted to a diagonal matrix by a unitary transform, and every matrix which can be made diagonal by a unitary transform is normal. • Proof:
Reading: Spectral decomposition theorem: For any normal matrix A, there exists a unitary matrix U so that where L is a diagonal matrix consists of the eigenvalues of A, and the columns of U are the eigenvectors of A. More explicit form: Apply to functions of matrices:
Read: Chapter 3: 6 Homework: 3.6.3,3.6.4,3.6.6,3.6.10,3.6.11 Due: October 7