Download
1 / 8
100 likes | 145 Views
This project explores challenges, difficulties, and applications of a sensor network assisting teleoperation, focusing on data collection, synchronization, and environmental constraints. It aims to improve military operations, navigation, exploration, and more.

E N D
Sensor Network Assisted Teleoperation Students: Jason Gorski, Aleksandra Krsteva,Yuanyuan Chen Faculty: Imad H. Elhajj Department of Computer Science and Engineering Communications and Robotics Laboratory
Remote Site Operator Interface Site : Internet Teleoperated Robot Sensor Network Force Feedback Haptic Device The Idea
Challenges, Difficulties & Applications • Challenges • Collect and aggregate data • Interfacing sensor network to a human and a robot • Synchronization of data • Difficulties • Dynamic and Unknown Environment • Localization of the sensor network and the mobile robot • Sensory Errors • Energy and Processing Constraints • Applications: • Military • Safe/Efficient Navigation • Search and Recovery • Automotive • Collision Avoidance • Exploration • Space • Deep Sea • Environmental • Oil Spill Containment/Avoidance • Tracking
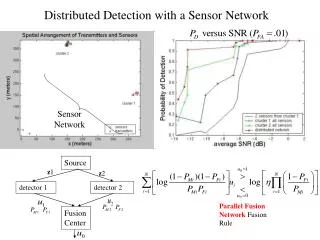
Theory – Vector Approach Area of Interest Sensor Node Mobile Robot Light Intensity Bearing Position Scalar Distance Intensity
Theory – Quadrant Approach Area of Interest Q2 Q1 Sensor Node Q3 Q4 Mobile Robot Where: C = Confidence Level of Sensor Readings I = Average Intensity Q = Quadrant Location of Each SN
Experimental Setup Sensor 1 Sensor 3 Mobile Robot Sensor 2
Results – Dual Sensors Single Sensor Results – For Reference
Results Data Fusion Using Vector Approach Data Fusion Using Quadrant Approach