Download
1 / 31
310 likes | 327 Views
Improve hydrodynamic forecast accuracy in Tagus Estuary for better management, navigation, and environmental impact considerations using data assimilation techniques.

E N D
Modelling and Data Assimilation Techniques forOperational Hydrodynamic Forecast in Tagus Estuary Ângela Pereira de Matos Canas Dissertação para obtenção do grau de Doutor em Engenharia do Ambiente Supervisor: Doutor Aires José Pinto dos Santos (Instituto Superior Técnico) Co-supervisor: Doutor Paulo Miguel Chambel Filipe Lopes Teles Leitão (Hidromod, Modelação em Engenharia, Lda.) April 2009
Contents • Objective • State of the Art • Research Hypotheses • Hypothesis 4 • Conclusions • Future Work
Possible to improve hydrodynamic forecast through an alternative model configuration or the use of data assimilation techniques? 1. Objective • Improve the forecast of Tagus Estuary system, contributing to reach operational status.
summer Tools to help manage this sensible system? winter • Affecting: • navigation; • biologic production/fishing; • dispersion of domestic/industrial efluents. 2. Tagus Estuary Marshlands Fish/bird nursery Natural Reserve • Largest Portuguese Estuary; • Three distinct parts (Martins, 1999); • Hydrodynamics: • Semi-diurnal tide, max. 2m; • Tagus flow (well mixed estuary); • Wind in coast; • Coastal storms (Gama et al., 1994). Industry Navigation Cities
Data assimilation Boundary conditions Integration of scales (processes, grid) Nested modelling (one-way, two-way) Numerical model Validation Data processing Measurement network In-situ (tide gauges, ADCP) Remote sensing River flows Databases Posting Prandle, 2000, Coastal Engineering, 41, 3-12 2. Operational Oceanography • Objective: forecast future conditions; • Components: Operational models Global: HYCOM MERCATOR Regional/local: GoMMOOS PORTS NIVMAR
2. Data Assimilation Tide gauges (SSH,U,V) for Tagus Estuary hydrodynamics
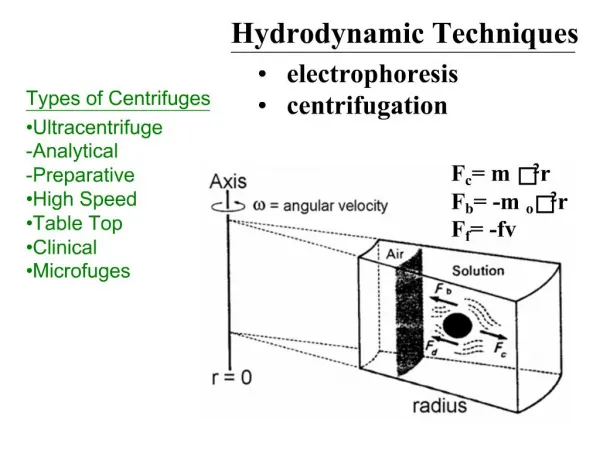
assimilation times observations forecast state 2. Sequential Methods • Assimilation in time instants; • Correction of state estimate; • Based on Kalman filter (Kalman, 1960). state ti t0 • Advantages: • - independent of model • support simplifications (adaptation to cost) • possible low complexity • Disadvantages: • - discontinuous state trajectory • required error statistics • assumptions made
Data assimilation problem: Extension to non linear models: EKF (Jazwinsky, 1970): linearization of M/H for P and analysis evolution; SEEK (Pham et al., 1998a): [P] = rxr, r << n EnKF (Evensen, 1994): ~ P SEIK (Pham et al., 1998b): ~ P Forecast equation Weakly non linear Observations equation N~100/200 Highly non linear r+1~10 • Kalman filter assumptions: • M, H: linear; • errors: null averaged, gaussian, independent (/); [P] [R] [Q] Suboptimal Optimal nxn nxn pxp [P] = 47963x47963 ! 2. Sequential Methods
(Fernandes, 2005) • Several domains: • Barotropic: tide propagation from FES 95.2 solution (Le Provost et al., 1998) – 2D; • Baroclinic: Tagus Estuary – 2D (water quality)/3D (outfall pollution). 24h Forcings: tide, meteo (wind, temperature, heat fluxes, solar radiation, relative humidity) 0.3 Km 2 Km • In-situ: meteorological station, hydrometric station, ocasional ADCP; • Surveys: water/sediment sampling, multiparametric sensor in ship. ? Newtonian relaxation 2. MOHID Tagus Estuary MOHID Water Modelling System (Neves, 1985; Santos, 1995; Martins, 1999; Leitão, 2003) 3D baroclinic primitive equations Validation Posting (http://www.mohid.com/tejo-op/)
3. Research Hypotheses • MOHID Tagus Estuary limitations (Leitão, 2003; Fernandes, 2005): • Model open boundary reference solution: • Tide Hypothesis 1 • Mean sea level Hypothesis 2 • Density vertical stratification Hypothesis 3 • Data assimilation Hypothesis 4 Not supported Supported Supported
4. Hypothesis 4 - Formulation • Data assimilation of tide gauge measurements with SFEK and SEEK filters: • Improve water level and velocity affected by mean sea level error (2D domain 2); • Evidences: • Estuarine hydrodynamics require very high resolution (Fortunato et al., 1999); • Filters for non linear models at low cost/complexity; • Easily scalable to EnKF or SEIK. 1 – Peniche 6 – Cacilhas 11 - Montijo 2 – Sesimbra 7 – Alfeite 12 - Alcochete 3 – Cascais 8 – Lisboa 13 – Ponta de Erva 4 – Paço de Arcos 9 – Cabo Ruivo 14 – Póvoa de Santa Iria 5 – Trafaria 10 – Seixal 15 – Vila Franca de Xira
Implementation in MOHID Water framework: Corrector equations Initialization Analysis error covariance EOF analysis Kalman gain Hydrodynamic_#.hdf5 ... WaterProperties_#.hdf5 Assimilation PreProcessor r << n Analysis Optional correction at initial time Measurements (time series) Filter correction basis L0 Optional reorthonormalization of L Predictor equations State forecast MOHID Water Sequential Assimilation (SFEK, SEEK) Model Modules Forecast error covariance Hydrodynamic WaterProperties Not done in SFEK 4. Hypothesis 4 - Methodology SEEK filter:
Assumptions: SEEK: State estimate error described by correction basis L0 in r subspace; Non linear model able to evolve L conserving error representation; able to represent model errors and filter errors; Traditional: L0 from state estimates variability. 4. Hypothesis 4 - Methodology • Filter parameters: • L0 and dimension of state error subspace r (covariance between all state variables); • (weighting factor of forecast and observations in analysis, << 1 approach to observations); • R; • (SEEK).
- Tide; • Spatially variable wind (ERA40 reanalysis); • No newtonian relaxation; Tide gauge measurements True model Hypothesis 1 • - Tide; • Spatially variable wind (ERA40 reanalysis); • No newtonian relaxation; • Mean sea level noise N(0, (0.1m)2) Perturbed model Hypothesis 1 4. Hypothesis 4 - Methodology • Application in MOHID Tagus Estuary in Twin Experiment: State = domain 2 (SSH, U, V)
= 0.75 Base filter options: L0from historical model forecasts 4 correction modes 5 measurements every 6 h = 1 4. Hypothesis 4 - Methodology • Two simulations for 01/10/1972 – 31/01/1973; • EOF analysis of last three months; • Simulations of Perturbed Model with data assimilation (01/11/1972 – 15/11/1972): • SFEK; • SEEK. • Test of several filter options: • ; • composition of L0; • initial correction of state; • measurements: number/frequency.
U EOF1 V EOF1 4. Hypothesis 4 - Results SSH EOF1 • EOF analysis: • dominated by tide; • not capturing local hydrodynamics. • 4 EOFs represent 85% of state variability;
5 measurements 10 measurements 4. Hypothesis 4 - Results SFEK • SSH: 5%-25% RMSE reductions; • U, V: not corrected coast and inner estuary, improved with more measurements; • Correction frequency (6h vs 1h) only important in upper estuary. Tagus river ocean SSH analysis: relative RMSE Tagus river ocean U analysis: relative RMSE
5 measurements 10 measurements 4. Hypothesis 4 - Results SEEK • SSH, U, V: corrections inexpressive in most Tagus Estuary; • U, V: degraded in coast. Tagus river ocean SSH analysis relative RMSE Tagus river ocean U analysis relative RMSE
Not valid at initial time: • poor corrections especially in velocity fields (coast, estuary); • SFEK correction improved with more locations and frequency of measurements (upper estuary); SFEK correction weak where basis representation is good but where model is known to be highly non linear (Cascais, Sesimbra); 4. Hypothesis 4 - Discussion • Hypothesis not supported! • Assumptions: • Scheme: • State estimate error described by LULT in r space; • Non linear model able to evolve L conserving error representation; • Traditional: • L0 from state estimates variability; • L0 cannot be estimated from whole domain EOF analysis.
5. Conclusions • MOHID Tagus Estuary near state-of-the-art numerical model, requiring improvement in boundary solutions and in data assimilation; • Tide representation mainly limited by bathymetry quality/resolution; • Atmospheric pressure acting on large scale important for water level variability with period above 30h in lower and middle estuary; • Large scale climatological density stratification useful to describe Tagus Estuary mouth stratification; • MOHID Water with simplified Kalman filters easily expandable to more powerful schemes for non linear applications; • Traditional SFEK and SEEK filters unsatisfactory correcting MOHID Tagus Estuary state due to weak representation of state error in correction basis.
6. Future Work • Tide representation: test improved boundary solution (FES 2004) and assess effect of bathymetry; • Assess local effect of wind and atmospheric pressure in mean sea level variability; • Reduce mean sea level bias in MOHID Tagus Estuary; • Test usefulness of large scale model density stratification in improving stratification variability in MOHID Tagus Estuary; • Improve MOHID Water data assimilation module with a learning mechanism for improving filter correction basis (Brasseur et al., 1999) and implement SEIK filter; • Assess data assimilation usefulness in improving water quality.
(contract SFRH/BD/14185/2003) (Program INTERREG IIIB – ATLANTIC AREA) (contract SST4-CT-2005-012336) Thank you
3. Hypothesis 1 • Enlargement of domain 1: • Continental Portuguese and Galician Coasts; • Improve tide representation; • Evidences: • Tide error (Leitão, 2003; Fernandes, 2005); • Global tide solution at continental shelf may degrade tide representation (Sauvaget et al., 2000; Leitão, 2003); • Hypothesis not supported.
0.4m ocean Tagus river 4. Hypothesis 2 • Large scale atmospheric pressure effect on mean sea level: • Improve without tide water level representation (2D domain 2); • Evidences: • Storm surge is important in Portuguese Coast (Gama et al., 1994; Ferreira, 2004); • Atmospheric pressure is the dominant cause (Fanjul et al., 1998); • Absent from previous model studies (Leitão, 2003; Fernandes, 2005); • Hypothesis supported.
Levitus (1982) climatology 5. Hypothesis 3 • Account thermal and saline vertical stratification: • Improve density stratification (3D domain 2); • Evidences: • Thermal and saline stratification deficiencies (Leitão, 2003; Fernandes, 2005). • Hypothesis supported for outfall area.
Analysis evolution with : Hoteit and Pham, 2004, Journal of Marine Systems, 45, 173-188. 6. Hypothesis 4 - Methodology • Assumptions: • Scheme: • State estimate error described by LULT in r space; • Non linear model able to evolve L conserving error representation; • able to represent model errors and filter errors ( << 1 approach to observations); • SFEK: error variability modes remain fixed in time; • Traditional: • L0 from state estimates variability.
assimilation window observations 2. Variational Methods • Assimilation in time interval; • Adjustment of control variables (model parameters, initial/boundary conditions). state ti t0 Advantages: - disperse (space, time) measurements - smooth state trajectory - unrequired state error statistics specification • Disadvantages: • difficult application in operational forecasting • - low flexibility to model changes • - complex development
Data assimilation problem: Extension to non linear models: EKF (Jazwinsky, 1970): linearization of M/H for P and analysis evolution; SEEK (Pham et al., 1998a): [P] = rxr, r << n EnKF (Evensen, 1994): ~ P SEIK (Pham et al., 1998b): ~ P Forecast equation Weakly non linear Observations equation N~100/200 Highly non linear EnKF r+1~10 • Kalman filter assumptions: • M, H: linear; • errors: null averaged, gaussian, independent (M/yo); [P] [R] [Q] SEEK SEIK Suboptimal Optimal nxn nxn pxp [P] = 47963x47963 ! 2. Sequential Methods
Kalman filter: n = 3: Corrector equations Forecast equation Kalman Gain 3x3 Observations equation Analysis Kalman filter assumptions Analysis error covariance P R Q 3x3 Predictor equations p = 2 (1 and 3): observation operator State forecast 1D schematic case: Forecast error covariance 2x2 2x3 6. Hypothesis 4 - Methodology Data assimilation problem:
Implementation in MOHID Water framework: SEEK filter: Corrector equations Initialization Kalman gain EOF analysis Hydrodynamic_#.hdf5 ... WaterProperties_#.hdf5 Assimilation PreProcessor Analysis r << n Analysis error covariance Optional correction at initial time Measurements (time series) Filter correction basis L0 Predictor equations Optional reorthonormalization of L State forecast MOHID Water Sequential Assimilation (SFEK, SEEK) Model Modules Forecast error covariance Hydrodynamic WaterProperties Not done in SFEK 4. Hypothesis 4 - Methodology