Download
1 / 6
60 likes | 213 Views
MODELS. PURPOSE: Predict the future, test outcomes of various scenarios, identify the important components or variables, and understand how the parts interact EXAMPLES: Democritus Ptolemy, Copernicus, Kepler, Newton, Maxwell, Young, Einstein, Planck, Dirac, Hawkins, Witten, Susskind etc.

E N D
MODELS • PURPOSE: Predict the future, test outcomes of various scenarios, identify the important components or variables, and understand how the parts interact • EXAMPLES: Democritus Ptolemy, Copernicus, Kepler, Newton, Maxwell, Young, Einstein, Planck, Dirac, Hawkins, Witten, Susskind etc
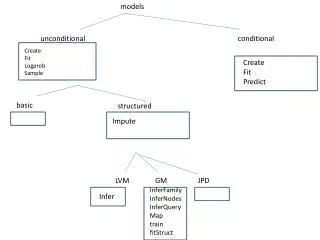
MODELS • EXAMPLES: Miniatures (toys), Collections of working parts( levers, gears, springs, wheels), “Test Tube” Experiments (chemicals ,organelles, cells, animals), Conceptual (Newton, Maxwell, Einstein, Dirac, Whitten), Computational (neural network)
MODELS Models may or may not actually resemble actual physical systems we are trying to understand because of issues of scale, complexity, or understanding of parts and how they interact A good model will be predictive, heuristic, convenient (efficient enough)
MODELS • CLOCKWORK OR DETERMINISTIC • STATISTICAL OR PROVIDE LIKELIHOOD • EMERGENT • RANDOM • PROBLEM OF REAL DYNAMIC SYSTEMS
EMERGENT SYSTEMS • Model contains many parts that interact, is dynamic, and allows feedback • Bottom up rules are simple • Behavior of system not predictable by behavior of parts • Key is interaction which is not defined by the simple rules • Definition is fuzzy
EMERGENT SYSTEMS • Behavior is not predictable based on known properties of the individual parts • Flocking, ant colony movement, shape of sand dunes, wetness of water, Evolution, ?Life, ?Consciousness • Problem of engineered vs. natural emergent systems (robotic emergent behavior) • Will we create machines with minds or life in a test tube from simple chemicals?