Download
1 / 35
350 likes | 554 Views
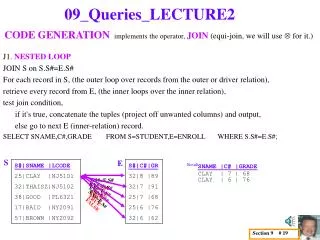
Nested-Loop joins. “one-and-a-half” pass method, since one relation will be read just once. Tuple -Based Nested-loop Join Algorithm: FOR each tuple s in S DO FOR each tuple r in R DO IF r and s join to make a tuple t THEN output t

E N D
Nested-Loop joins • “one-and-a-half” pass method, since one relation will be read just once. • Tuple-Based Nested-loop Join Algorithm: FOR each tuple s in S DO FOR each tuple r in R DO IF r and s join to make a tuple t THEN output t Improvement to Take Advantage of Disk I/O Model • Instead of retrieving tuples of R, T(S) times, load memory with as many tuples of S as can fit, and match tuples of R against all Stuples in memory.
Block-based nested loops • Assume B(S) ≤ B(R), and B(S) > M • Read M-1 blocks of S into main memory and compare to all of R, block by block FOR each chunk of M-1 blocks of S DO FOR each block b of R DO FOR each tuple t of b DO find the tuples of S in memory that join with t output the join of t with each of these tuples
Example • B(R) = 1000, B(S) = 500, M = 101 • Important Aside: 101 buffer blocks is not as unrealistic as it sounds. There may be many queries at the same time, competing for mainmemory buffers. • Outer loop iterates 5 times at 100 I/O’s each • At each iteration we read M-1 (i.e. 100) blocks of S and all of R (i.e. 1000) blocks. • Total time: 5*(100 + 1000) = 5500 I/O’s • Question: What if we reversed the roles of R and S? • We would iterate 10 times, and in each we would read 100+500 blocks, for a total of 6000 I/O’s. • Compare with one-pass join, if it could be done! • We would need 1500 disk I/O’s if B(S) M-1
Analysis of blocks nested loops • Number of disk I/O’s: [B(S)/(M-1)]*(M-1 +B(R)) or B(S) + [B(S)B(R)/(M-1)] or approximately B(S)*B(R)/M
Two-pass algorithms based on sorting • This special case of multi-pass algorithms is sufficient for most of the relation sizes. Main idea for unary operations on R • Suppose B(R) M (main memory size in blocks) • First pass: • Read M blocks of R into MM • Sort the content of MM • Write the sorted result (sublist/run) into M blocks on disk. • Second pass: create final result
Duplicate elimination using sorting • In the second phase (merging) we don’t sort but copy each tuple just once. • We can do that because the identical tuples will appear “at the same time,” i.e. they will be all the first ones at the buffers (for the sorted sublists). • As usual, if one buffer gets empty we refill it.
Duplicate-Elimination using Sorting Example • Assume M=3, each block holds 2 records and relation R consists of the following 17 tuples: 2, 5, 2, 1, 2, 2, 4, 5, 4, 3, 4, 2, 1, 5, 2, 1, 3 • After the first pass the following sorted sub-lists are created: 1, 2, 2, 2, 2, 5 2, 3, 4, 4, 4, 5 1, 1, 2, 3, 5 • In the second pass we dedicate a memory buffer to each sub-list.
Analysis of (R) • 2B(R) when creating sorted sublists • B(R) to read each sublist in phase 2 • Total: 3B(R) • How large can R be? • There can be no more than M sublists since we need one buffer for each one. • So, B(R)/M ≤ M, (B(R)/M is the number of sublists)i.e.B(R) ≤ M2 • To compute (R) we need at least sqrt(B(R)) blocks of MM.
Sort-based , , - Exampe: set union. • Create sorted sublists of RandS • Use input buffers for sorted sublists of R and S, one buffer per sublist • Output each tuple once. We can do that since all the identical tuples appear “at the same time.” • Analysis: 3(B(R) + B(S)) disk I/O’s • Condition: B(R) + B(S) ≤ M2 • Similar algorithms for sort based intersection and difference (bag or set versions).
Join • A problem for joins but not for the previous operators: The number of joining tuples from the two relations can exceed what fits in memory. • First, we can try to maximize the number of available buffers for putting the joining tuples. • How, we can do this? • By minimizing the number of sorted sublists (since we need a buffer for each one of them).
Simple sort-based join • For R(X,Y) S(Y,Z) with M buffers of memory: • Sort Ron Y, sort Son Y • Merge phase • Use 2 input buffers: 1 for R, 1 for S. • Pick tuple t with smallest Y value in the buffer for R (or for S) • If t doesn’t match with the first tuple in the buffer for S, then just remove t. • Otherwise, read all the tuples from R with the same Y value as t and put them in the M-2 part of the memory. • When the input buffer for R is exhausted fill it again and again. • Then, read the tuples of S that match. For each one we produce the join of it with all the tuples of R in the M-2 part of the memory.
Example of sort join • B(R) = 1000, B(S) = 500, M= 101 • To sort R, we need 4*B(R) I/O’s, same for S. • Total disk I/O’s = 4*(B(R) + B(S)) • Doing the join in the merge phase: • Total disk I/O’s = B(R) + B(S) • Total disk I/O’s = 5*(B(R) + B(S)) = 7500 • Memory Requirement: To be able to do the sort, should have B(R) ≤ M2 and B(S) ≤ M2 • Recall: for nested-loop join, we needed 5500 disk I/O’s, but the memory requirement was quadratic (it is linear, here), i.e., nested-loop join is not good for joining relations that are much larger than MM.
Potential problem ... • If the tuples from R (or S) with the same value y of Y do not fit in M-1 buffers, then we use all M-1 buffers to do a nested-loop join on the tuples with Y-value y from both relations. • Observe that we can “smoothly” continue with the nested loop join when we see that the R tuples with Y-value y do not fit in M-1 buffers. S(Y, Z) --------- a z1 a z2 ... a zm R(X , Y) ----------- x1 a x2 a … xn a What if n+1 > M-1 and m+1 > M-1?
R Join? S sorted runs Can We Improve on Sort Join? • Do we really need the fully sorted files?
A more efficient sort-based join • Suppose we are not worried about many common Y values • Create Y-sorted sublists of R and S • Bring first block of each sublist into a buffer (assuming we have at most M sublists) • Find smallest Y-value from heads of buffers. Join with other tuples in heads of buffers, use other possible buffers, if there are “many” tuples with the same Y values. • Disk I/O: 3*(B(R) + B(S)) • Requirement: B(R) + B(S) ≤ M2
Example of more efficient sort-join • B(R) = 1000, B(S) = 500, M= 101 • Total of 15 sorted sublists • If too many tuples join on a value y, use the remaining 86 MM buffers for a one pass join on y • Total cost: 3(1000 + 500) = 4500 disk I/O’s • M2 =10201 > B(R) + B(S), so the requirement is satisfied
Two-pass algorithms based on hashing • Main idea: Let B(R) > M • instead of sorted sublists, create partitions, based on hashing • Second pass to create result from partitions
Creating partitions • Here partitions are created based on all attributes of the relation except for grouping and join, where the partitions are based on the grouping and join-attributes respectively. • Why bucketize? Tuples with “matching” values end up in the same bucket. Initialize M-1 buckets using M-1 empty buffers; FOR each block b of relation R DO read block b into the M-th buffer; IF the buffer for bucket h(t) has no room for t THEN copy the buffer to disk; initialize a new empty block in that buffer; ENDIF ; copy t to the buffer for bucket h(t); ENDFOR; FOR each bucket DO IF the buffer for this bucket is not empty THEN write the buffer to disk;
R 2 4 3 5 8 9 S 5 4 12 3 13 8 11 14 Buckets Even 2 4 8 4 12 8 14 R S 3 5 9 5 3 13 11 Odd Simple Example Hash : even / odd
Hash-based duplicate elimination • Pass 1: create partitions by hashing on all attributes • Pass 2: for each partition, use the one-pass method for duplicate elimination • Cost: 3B(R) disk I/O’s • Requirement: B(R) ≤ M*(M-1) (B(R)/M is the approximate size of one bucket) i.e. the req. is approximately B(R) ≤ M2
Hash-based grouping and aggregation • Pass 1: create partitions by hashing on grouping attributes • Pass 2: for each partition, use one-pass method. • Cost: 3B(R), Requirement: B(R) ≤ M2 • If B(R) > M2 • Read blocks of partition one by one • Create one slot in memory for each group-value • Requirement: where L is the list of grouping attributes
Hash-based set union • Pass 1: create partitions R1,…,RM-1 of R, and S1,…,SM-1 of S (with the same hash function) • Pass 2: for each pair Ri, Si compute RiSi using the one-pass method. • Cost: 3(B(R) + B(S)) • Requirement? • min(B(R),B(S)) ≤ M2 • Similar algorithms for intersection and difference (set and bag versions)
Partition hash-join • Pass 1: create partitions R1, ..,RM-1 of R, and S1, ..,SM-1 of S, based on the join attributes (the same hash function for both R and S) • Pass 2: for each pair Ri, Si compute Ri Si using the one-pass method. • Cost: 3(B(R) + B(S)) • Requirement: min(B(R),B(S)) ≤ M2
R 100 ... ... 10 blocks Example • B(R) = 1000 blocks • B(S) = 500 blocks • Memory available = 101 blocks • R S on common attribute C • Use 100 buckets • Read R • Hash • Write buckets • Same for S
Read one R bucket • Build memory hash table • Read corresponding S bucket block by block. S R ... R ... Memory Cost • “Bucketize:” • Read + write R • Read + write S • Join • Read R • Read S Total cost = 3*[1000+500] = 4500
Saving some disk I/O’s (I) • If we have more memory than we need to hold one block per bucket, then we can use several buffers for each bucket, and write them out as a group saving in seek time and rotational latency. • Also, we can read the buckets in group in the second pass and saving in seek time and rotational latency. • Well, these techniques don’t save disk I/O’s, but make them faster. • What about saving some I/O’s?
Saving some disk I/O’s (II) • Suppose that to join R with S we decide to create k buckets where k is much smaller than M. • When we hash S we can keep m of the k buckets in memory, while keeping only one block for each of the other k-m buckets. • We can do so provided • m*(B(S)/k) +(k-m) M • B(S)/k is the approximate size of a bucket of S. • Now, when we read the tuples of R, to hash them into buckets, we keep in memory: • The m buckets of S that were never written out to disk, and • One block for each of the k-m buckets of R whose corresponding buckets of S were written to disk.
Saving some disk I/O’s (III) • If a tuple t of R hashes to one of the first m buckets, then we immediately join it with all the tuples of the corresponding S-bucket. • If a tuple t of R hashes to a bucket whose corresponding S-bucket is on disk, then t is sent to the main memory buffer for that bucket, and eventually migrates to disk, as for a two pass, hash-based join. • In the second pass, we join the corresponding buckets of R and S as usual (but only m-k). • The savings in I/O’s is equal to two for every block of the S-buckets that remain in memory, and their corresponding R-buckets. Since m/k of the buckets are in memory we save 2(m/k)(B(S)+B(R)) .
Saving some disk I/O’s (IV) How can we choose m and k? • All but k-m of the memory buffers can be used to hold tuples of S, and the more of these tuples, the fewer the disk I/O’s. • Thus, we want to minimize k, the number of buckets. • We do so by making each bucket about as big as can fit in memory, i.e. the buckets are of (approximately) M size, and therefore k=B(S)/M. • If that is the case, then there is room for one bucket in memory, i.e.m=1. • We have to make the bucket actually M-k blocks, but we are talking here approximately, when k<<M. • So, we have that the savings in I/O’s are: • 2(M/B(S))*(B(R) + B(S)) • And, the total cost is: • (3 - 2(M/B(S)))*(B(R) + B(S))
Sort vs. Hash based algorithms • Hash-based algorithms have a size requirement that depends only on the smaller of the two arguments rather than on the sum of the argument sizes, as for sort-based algorithms. • Sort-based algorithms allow us to produce the result in sorted order and take advantage of that sort later. The result can be used in another sort-based algorithm later. • Hash-based algorithms depend on the buckets being of nearly equal size. Well, what about a join with a very few values for the join attribute…