Download
1 / 17
170 likes | 275 Views
Estimator Design For Engine Speed Limiter. Presented By: Beshir, Abeba Kharrat, Amine Hu, Zhiyuan Sun,Yu He, Nan. Professor: Riadh Habash TA: Wei Yang. Contents. References Background Project Objective Kalman Observer & Design Experiment & Results Conclusion. References.

E N D
Estimator Design For Engine Speed Limiter • Presented By: • Beshir, Abeba • Kharrat, Amine • Hu, Zhiyuan • Sun,Yu • He, Nan Professor: Riadh Habash TA: Wei Yang
Contents • References • Background • Project Objective • Kalman Observer & Design • Experiment & Results • Conclusion
References • Engine Speed Limiter for Watercrafts • Philippe Micheau, R. Oddo and G. Lecours, from IEEE Transaction on Control Systems Technology VOL 14, NO 3, May 2006. • Engine Speed Control • Peter Wellstead and Mark Readman, control systems principles.co.uk • An Observer-Based Controller Design Method for Improving Air/Fuel characteristics of Spark Ignition Engines • By Seibum B. Choi and J. Karl Hedrick, IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 6, NO. 3, MAY 1998 • http://www-ccs.ucsd.edu/matlab/toolbox/control/kalman.html?cmdname=kalman • http://auto.howstuffworks.com/engine1.htm • http://www.cs.unc.edu/~welch/kalman/ • Kalman Filter Tutorial
Background • 3 cases: watercraft propeller: Fully loaded (completely submerged) Partially loaded (partially submerged) Unloaded (completely emerged)
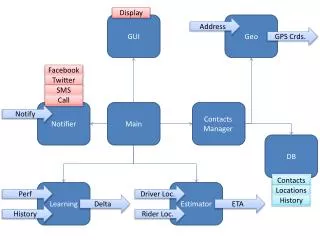
Project Objective • Design observer to estimate state variables: • Load Torque (Tload) • Engine Speed (N)
Observer (State Estimation) y(t) Plant Observer (state estimator) xhat(t) u(t) Xhat(t) = Nhat, Tloadhat (2 state variables) u(t) = Teng y(t) = N, Tload (2 outputs)
System Modeling (cont’d) • To estimate TLoad.
Kalman Filter • Estimates the state of a system for measurements containing random errors (noise). • Relatively recent development in filtering (1960)
Kalman Filter (Cont’d) Circles -- vectors, Squares -- matrices Stars -- Gaussian noise with the associated covariance matrix at the lower right. Fk -- state transition model Bk -- control-input model wk -- the process noise
Kalman Filter (Cont’d) Kalman Filter phases:
Experiment & Results Input Data (Teng)
Experiment & Results (Cont’d) Output Data (N, TLoad)
Conclusion • Kalman filter provides good estimate of state variables in presence of noise/disturbance. • Advantages: • Can achieve virtually any filtering effect • Forecasting characteristics using Least-Square model • Reduce “False alarms” (filter disturbances) • optimal multivariable filter
Conclusion (Cont’d) • Examples of application: • aerospace; • marine navigation; • nuclear power plant instrumentation; • demographic modeling; • manufacturing, and many others. • Limitations/ Future improvements: • Speed: filter speed is limited by the system architecture • Cost