Download
1 / 42
420 likes | 439 Views
Uncertainty Quantification and Visualization: Geo-Spatially Registered Terrains and Mobile Targets Suresh Lodha Computer Science, University of California, Santa Cruz. Common consistent representation of multiple views of geo-spatially registered terrains

E N D
Uncertainty Quantification and Visualization:Geo-Spatially Registered Terrains and Mobile TargetsSuresh LodhaComputer Science, University of California, Santa Cruz • Common consistent representation of multiple views of geo-spatially registered terrains • Low uncertainty compression algorithms preserving line features within terrains • Visualization of uncertainty of GPS-tracked mobile targets • Integration of mobile targets and terrains with geographic databases for decision-making
Accomplishments - I • Development of GIS infrastructure for context-aware situational visualization • Development of GPS infrastructure for mobile visualization • Work on consistency and uncertainty issues in mobile situational (GIS-GPS) visualization
Accomplishments - II • Modeling and quantifying uncertainty • Probability-based uncertainty (collaboration with Pramod Varshney, Syracuse University) • Spatio-temporal GPS uncertainty • Low uncertainty line preserving compression algorithms for terrains (extension from point preserving algorithms from previous year)
Accomplishments - III • Integration of data and uncertainty within a global geospatial system (collaboration with Georgia Tech) • Application to • Geospatial visualization • General Aviation • Continuing work on • Multimodal interaction (speech) • Database querying • Wireless networks for communicating and visualizing data and information with associated uncertainty • Probability-based uncertainty (collaboration with Pramod Varshney, Syracuse University) • Spatio-temporal GPS uncertainty • Low uncertainty line preserving compression algorithms for terrains (extension from point preserving algorithms from previous year)
GIS Infrastructure • Aerial Imagery (DOQQs) • Elevation Data • Digital Elevation Models (DEMs) • LIDAR Data • Architectural Drawings • Street Maps • Schematic Diagrams
GPS Infrastructure • Ashtech Z-12/G-12 Sensors • Standalone (1 meter) / Differential (1 cm) • Velocity (.1 knots) • L1/L2 frequency (ionospheric delay correction) • RTK/RTCM messages • 10 Hz update rate
Consistency and Uncertainty in Mobile Situational Visualization • Disparate data sources • Different data formats • Different coordinate systems • Different resolutions/ sampling/ sizes • Different accuracy • Different time stamps • Communication time lags
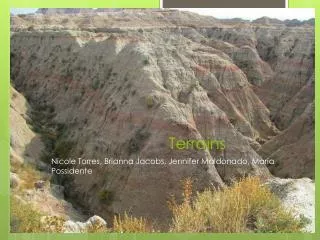
Common Consistent Representation: Multiple Views of Terrains Aerial Imagery AutoCAD Drawing LiDAR Data • Common Coordinate System • Geo-Spatial Registration • Accuracy
Common Consistent Representation: Multiple Views of Terrains
Modeling and Visualizing Uncertainty • Probability-based uncertain particle movement • GPS-based spatio-temporal uncertainty in particle movement • Low uncertainty compression algorithms preserving line features within terrains
Algorithmic Computation • Compute the probability of target at a point x after time t • Probability at an initial location (p) • Probability of movement along a direction (d) • Probability of speed (s) • Final probability = p * d * s
GPS Sources of Uncertainty • Measurement Errors • Satellite clock drift, receiver clock drift, satellite location error, atmospheric effects, multipath effect, selective availability • GPS Availability Issues • GPS Integrity Anomalies and Vulnerability
Parameters • Mode • Standalone / Differential • Environment • Urban / Foliage • Movement • Stationary • Moving (Constant Velocity, Random)
Modeling: Static Data • Number of accessible/used satellites • Urban higher than foliage • Standalone same as differential • SNR (Signal to Noise Ratio) values • Urban higher than foliage • Standalone same as differential • DOP (Dilution of Precision) values • Urban smaller than foliage • Standalone smaller than differential
Dilution of Precision • Satellite Geometry and Orientation Good satellite geometry Poor satellite geometry
Terrain Uncertainty • Point feature preserving compression algorithms (last year MURI) • Line feature preserving compression algorithms • EMD (earth movers distance) concept extended to line features • More efficient local algorithm • Line preservation (coastlines etc.)
Topology Degradation Metric • EMD (Rubner et al. ‘98, Batra et al. ‘98, ’99, Lodha et al. 2000) • amount of work required to move one set of lines to another (similarity) • Variables • # features • Location of features • Feature Attributes • Length, Orientation
Line Preserving Compression Unconstrained Coastline preserving
Line Preserving Compression Coastline preserving Original Unconstrained
Integration of Data and Uncertainty within VGIS • Hierarchical zooming from the globe into the UCSC Campus (1/2 foot resolution imagery) • Real-time visualization of GPS-tracked objects and associated uncertainty within VGIS
Uncertainty Quantification, Visualization and Communication: Continuing Work • Heterogeneous Situational data • Mobile Temporal data • Data Fusion (Images, LIDAR) • Multi-modal Interaction (speech) • Database Querying • Wireless Networks
Collaborations - I • Worked with Pramod Varshney on probabilistic uncertain particle movement (1 joint paper and 1 jointly supervised student); continuing to collaborate on uncertainty with mobility constraints • Worked with Bill Ribarsky on integration of uncertainty within VGIS (1 joint paper and 1 jointly supervised student); continuing to collaborate on uncertainty in mobile situational visualization
Collaborations - II • Worked with Ulrich Neumann on development of GPS infrastructure • Worked with Avideh Zakhor on acquistion of LIDAR data • continuing to collaborate on uncertainty in GPS, LIDAR and image data
Uncertainty in 3D GeoSpatial Registration from Multiple Images
Major Accomplishments • Computation and visualization of uncertainty for terrains while preserving point and line features of terrains, • Computation and visualization of uncertain mobile GPS-tracked targets embedded within a GIS Environment, and • Embedding and visualization of uncertainty within the VGIS.
Publications • Suresh Lodha, A. P. Charaniya, Nikolai M. Faaland, and Srikumar Ramalingam,"Visualization of Spatio-Temporal GPS Uncertainty within a GIS Environment" to appear in the Proceedings of SPIE Conference on Aerospace/Defense Sensing, Simulation, and Controls, April 2002. • Suresh K. Lodha, Nikolai M. Faaland, Amin P. Charaniya, Pramod Varshney, Kishan Mehrotra, and Chilukuri Mohan, "Uncertainty Visualization of Probabilistic Particle Movement",To appear in the Proceedings of The IASTED Conference on Computer Graphics and Imaging", August 2002. • Suresh K. Lodha, Amin P. Charaniya, and Nikolai M.Faaland, "Visualization of GPS Uncertainty in a GIS Environment", Technical Report UCSC-CRP-02-22,University of California, Santa Cruz, April 2002, pages 1-100. • Suresh K. Lodha, Nikolai M. Faaland, Grant Wong, Amin Charaniya,Srikumar Ramalingam, and Arthur Keller, "Consistent Visualization and Querying of Geospatial Databases by a Location-Aware Mobile Agent“,submitted to ACM GIS Conference, November 2002. • Suresh K. Lodha, Nikolai M. Faaland, and Jose Renteria,“Hierarchical Line Preserving Simplification of Terrain Data”, In Preparation.
Publications - contd • Suresh K. Lodha, Nikolai M. Faaland, and Jose Renteria,``Hierarchical Topology Preserving Simplification of Vector Fields using Bintrees and Triangular Quadtrees'', Submitted for publication to IEEE Transactions on Visualization and Computer Graphics. • Lilly Spirkovska and Suresh K. Lodha,``AWE: Aviation Weather Data Visualization Environment'', {\em Computers and Graphics}, Volume 26, No.~1, February 2002, pp.~169--191. • Suresh K. Lodha, Krishna M. Roskin, and Jose Renteria,``Hierarchical Topology Preserving Compression of 2D Terrains'',Submitted for publication to Computer Graphics Forum. • Suresh K. Lodha and Arvind Verma, ``Spatio-Temporal Visualization of Urban Crimes on a GIS Grid'',Proceedings of the ACM GIS Conference, November 2000, ACM Press, pages 174--179. • Amin P. Charaniya, Srikumar Ramalingam, Suresh Lodha, Zach Wartell, Tony Wasilewski, Nick Faust, Bill Ribarsky, “Real-Time Mobile Uncertainty Visualization in VGIS”, to be Submitted to IEEE Visualization, 2002