Download
1 / 13
130 likes | 404 Views
E1 - Antiderivatives and Indefinite Integrals. IB Math HL/SL. (A) Review - Simple Antiderivatives. If v(t) = t 4 – 6t 2 + 4, find d(t) So we need to “undifferentiate” or “antidifferentiate” 3 functions (t 4 , 6t 2 , 3)

E N D
E1 - Antiderivatives and Indefinite Integrals IB Math HL/SL
(A) Review - Simple Antiderivatives • If v(t) = t4 – 6t2 + 4, find d(t) • So we need to “undifferentiate” or “antidifferentiate” 3 functions (t4, 6t2, 3) • So what equation did we differentiate to get t4 recalling the power rule, it must have been a t5 expression but the derivative of t5 is actually 5t4 so if we have only t4 as our “derivative”, then we are “off” by 1/5 so our “antiderivative” must be 1/5t5 (test by differentiating which does in fact give us 1t4) • Likewise, to have 6t2 as a derivative, we must have started with a t3 function but which one? if we differentiate t3, we get 3t2, so seeing that we have a 6t2, we clearly have twice what we need so we must have started with 2t3 or one-third of 6t3 (test by differentiating which does in fact give us 6t2) • And then consider the 4 (or 4x0) we must have started with an x1 function but which one? if we differentiate x1, then we get 1x0 we have 4x0, so we have four times what we need so we must have started with 4x1 or simply 4x (test by differentiating which does in fact give us 3) • So we have simply looked at power functions and seen a method for “undoing” a power rule add one to the exponent, then adjust the coefficient by dividing by the new exponent
(B) Review - Simple Antiderivatives & Initial Conditions • Another point needs to be addressed so let’s work with an easier function • Say v(t) = 4t (or rather d`(t) = 4t) then what is d(t)?? • If we anti-differentiate, we would predict d(t) = 2t2, but we need to realize that there is more to it than that Why? lets consider some derivatives and some graphs
(B) Review - Simple Antiderivatives & Initial Conditions So our derivative of y` = 4x could have come from any of the three “antiderivatives” of y = 2x2 or y = 2x2 + 4 or y = 2x2 – 6 or any other combination of y = 2x2 + C, where C is simply a constant that changes the y-intercept of the original parabola 2x2
(B) Review - Simple Antiderivatives & Initial Conditions • So back to our original problem if v(t) = t4 – 6t2 + 4, find d(t) • We have worked out that d(t) = 1/5t5 – 2t3 + 4t • Having just seen the last graphic discussion about “families of curves”, we realize that we need to add some constant to the “antiderivative” equation (the distance equation) so our equation for d(t) becomes d(t) = 1/5t5 – 2t3 + 4t + C which we will call our most general solution • Now, if we knew some information about the distance function, we could solve for C and complete our equation say at t = 0 sec, then d(0) = 2 m (the initial position of the object was 2 meters beyond some reference point) • Now d(0) = 1/5(0)5 – 2(0)3 + 4(0) + C = 2 C = 2 • Thus d(t) = 1/5t5 – 2t3 + 4t + 2 is our final specific solution
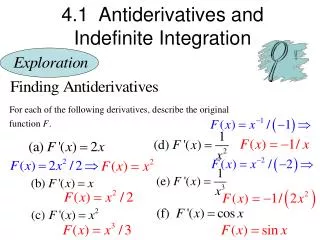
The functions: dy/dx = xn dy/dx = 0 dy/dx = 1 dy/dx = 1/x dy/dx = ekx dy/dx = coskx dy/dx = sinkx The antiderivatives: y = xn+1 / (n+1) + C y = 1 y = x + C y = ln|x| + C y = 1/k ekx + C y = 1/k sin(kx) + C y = -1/k cos(kx) + C (C) Review - Common Antiderivatives
(D) Indefinite Integrals - Definitions • We have worked with motion applications and velocity functions so we recognize that v(t) = s`(t) (i.e. that the velocity equation is simply the derivative of the position/displacement equation • So we will generalize the anti-derivative idea by saying that the function we are trying to anti-differentiate simply represents a derivative equation (i.e. the velocity function is the derivative of the displacement function) • Definitions: an anti-derivative of f(x) is any function F(x) such that F`(x) = f(x) If F(x) is any anti-derivative of f(x) then the most general anti-derivative of f(x) is called an indefinite integral and denoted f(x)dx = F(x) + C where C is any constant • In this definition the is called the integral symbol, f(x) is called the integrand, x is called the integration variable and the “C” is called the constant of integration • The process of finding an indefinite integral (or simply an integral) is called integration
(E) Properties of Indefinite Integrals • [c f(x)]dx = c f(x)dx • -f(x)dx = - f(x)dx • [f(x) + g(x)]dx = f(x)dx + g(x)dx • which is similar to rules we have seen for derivatives • And two other interesting “properties” need to be highlighted: • g`(x)dx = g(x) + C • d/dx f(x)dx = f(x)
(x4 + 3x – 9)dx = x4dx + 3 xdx - 9 dx (x4 + 3x – 9)dx = 1/5 x5 + 3/2 x2 – 9x + C e2xdx = sin(2x)dx = (x2x)dx = (cos + 2sin3)d = (8x + sec2x)dx = (2 - x)2dx = Continue now with these questions on line Problems & Solutions with Antiderivatives / Indefinite Integrals from Visual Calculus (F) Examples
(G) Indefinite Integrals with Initial Conditions • Given that f(x)dx = F(x) + C, we can determine a specific function if we knew what C was equal to so if we knew something about the function F(x), then we could solve for C • Ex. Evaluate (x3 – 3x + 1)dx if F(0) = -2 • F(x) = x3dx - 3 xdx + dx = ¼x4 – 3/2x2 + x + C • Since F(0) = -2 = ¼(0)4 – 3/2(0)2 + (0) + C • So C = -2 and • F(x) = ¼x4 – 3/2x2 + x - 2
(H) Examples – Indefinite Integrals with Initial Conditions • Problems & Solutions with Antiderivatives / Indefinite Integrals and Initial Conditions from Visual Calculus • Motion Problem #1 with Antiderivatives / Indefinite Integrals from Visual Calculus • Motion Problem #2 with Antiderivatives / Indefinite Integrals from Visual Calculus
(I) Internet Links • Calculus I (Math 2413) - Integrals from Paul Dawkins • Tutorial: The Indefinite Integral from Stefan Waner's site "Everything for Calculus” • The Indefinite Integral from PK Ving's Problems & Solutions for Calculus 1 • Karl's Calculus Tutor - Integration Using Your Rear View Mirror
(J) Homework • Stewart, 1989, Chap 11.2, p505, Q1,2 • Handout