Download
1 / 40
410 likes | 559 Views
Pulse Processing. Chapter No. 17 Radiation Detection and Measurements , Glenn T. Knoll, Third edition (2000), John Willey. 1. PULSE COUNTING SYSTEMS

E N D
Pulse Processing Chapter No. 17 Radiation Detection and Measurements, Glenn T. Knoll, Third edition (2000), John Willey. 1
PULSE COUNTING SYSTEMS The signal chain shown in Fig. 17.7 represents a basic measurement scheme in which only the number or rate of pulses from a radiation detector are to be recorded. The tail pulse output of the preamplifier typically has an amplitude of a few tens or hundreds of millivolts and is too small to be counted directly. Furthermore, the pile-up of these long pulses at high rates could cause stability problems. Therefore, the next step is normally to process the pulses through a linear amplifier. Here a voltage gain of 1000 or more caIl be provided so that the shaped linear pulse at its output can easily cover a span of 0--10 V. The shaping requirements in a simple counting system are usually not severe, and only at relatively high counting rates must one pay close attention to the specific method of shaping chosen. The interrelationship between the various signal pulses at different points in a typical pulse processing system is illustrated in Fig. 17.8. The current pulse from the detector are integrated on a long time constant circuit in the preamplifier, producing a tail pulse output· The linear amplifier then shapes this pulse to a much shorter width, and increases its amplitude by a factor given by its gain.
A. Integral Discriminator In order to count the pulses reliably, the shaped linear pulses must be converted into logic:pulses. The integral discriminator is the simplest unit that can be used for this conversion and consists of a device that produces a logic output pulse only if the linear input pulse amplitude exceeds a set discrimination level. If the input pulse amplitude is below the discrimination level, no output appears. This selection process is illustrated in Fig. 17.9a. Unless specifically designed otherwise, the logic pulse is normally produced shortly after, the leading edge of the linear pulse crosses the discrimination level. This leading edge timing is compared with other schemes of generating the logic pulse in the later section on time pick-off methods. The discrimination level is normally adjustable by a front-panel control. In many counting situations. the level is set just above the system noise so that the maximum sensitivity for counting detector pulses of all sizes is realized. Other situations may call for a higher discrimination level to count selectively only events above a set minimum size. For example, much of the background may be limited to relatively low pulse amplitudes so that some finite discrimination level may greatly enhance the signal-to-background counting ratio. Integral discriminators must be designed to accept shaped linear input pulses of a specific amplitUde span (usually 0-10 V positive). The stability and linearity of the discriminator adjustment are usually adequate for routine applications but may become important specifications for demanding situations.
Differenrential Discriminator (Single-Channel Analyzer) Another linear-to-Iogic converter in widespread use involves two independent discrimination levels. As illustrated in Fig. 17.9b, a differential discriminator or single-channel analyzer (SCA) produces a logic output pulse only if the input linear pulse amplitude lies between the two levels. The action of the unit is therefore to select a band of amplitudes or in which the input amplitude must fall in order to produce an output pulse. In some uni1ts lower-level discriminator (LLD) and upper-level discriminator (ULD) are independently adjustable from front-panel controls. In others, the lower level is labeled the E level, the window width or difference between levels is labeled E and can be varied separately without affecting the E level. In counting systems, the SCA can serve to select only a limited range of amplitudie from all those generated by the detector. A common example is one in which the window is set to correspond only to those events in the detector that deposit the full energy of incident radiation. In this way, one type or energy of radiation often can be measured selectively in the presence of other radiations. In normal. SCAs the time of appearence of the.logic pulse is not closely coupled to actual event timing, and use of these logic pulses in timing measurements will often give imprecise results. If one of the time pick-off methods is incorporated into the SCA design, the logic pulse can be much more closely correlated with this actual event time. Modules with this feature are often called timing SCAs and are widely used in coincidence applications or other timing measurements. Most SCAs provide the option of switching out the upper-level discriminator and using, the unit as a simple integral discriminator controlled by the lower level. The input linear pulses are intended to be shaped with typical 0.5-10 micro seconds widths and a pulse height range of 0-10 V positive. Bipolar pulses with positive leading edges are also normally acceptable.
C. Scalers or Counters As the final step in a counting system, the logic pulses must be accumulated and their number recorded over a fixed period of time. The device used for this purpose may be a simple digital register that is incremented by one count each time a logic pulse is presented to its input. such devices are sometimes calledscalers as a historic anomaly that dates from the time when digital registers of reasonable size were not widely available. Then it was common to use a scaling circuit to divide the input pulse repetition rate by a fixed factor such as 100 or 1000 so that the rate would be low enough to be directly recorded by an electromechanical register. These systems have been replaced by all-electronic digital registers. The scaling function persists only in the sense that an overflow output pulse is often provided when the maximum content of the register is exceeded (usually no less than HP or 106 counts). We henceforth refer to such units as counters· because that term more adequately describes the actual function. Counters are commonly operated in one of two modes: preset time and preset count. In the preset time mode, the counting period is controlled by an internal or external timer. This timer may be built as part of a common chassis with the counter, or separate timers can be obtained as individual modules. In the preset count mode, the counter will accumulate pulses until a specified total has been achieved, at which point the counting period is terminated. If the period of time over which these counts have been accumulated can be recorded independently, the counting rate can be determined. The preset count mode has the advantage that a given statistical precision can be specified before the start of the measurement,since the duration of counting will be prolonged until enough counts have been accumulated to guarantee the desired statistical precision. Counters can also be of the blind or display type. In a display counter, the contents of the register are continuously displayed on a front-panel numeric indicator. Display counD. ters provide the advantage that the progress of a measurement can be monitored visually and malfunctions can often be detected quickly by aberrant behavior of the digital display.
Blind counters do not provide a visual display but, instead, can generate a coded logic readout of the register content when triggered by an external command. Because blind counters are less expensive than the display type, they have found favor in large-scale systems in which many independent counts must simultaneously be accumulated. In that event, the blind counters are often part of a CAMAC system in which the interrogation and readout take place over the dataway. A printing counter is one in which an interface has been provided to generate the proper readout signals to drive a conventional line printer or other device. Other features found in some counters include an internal input gate that can be controlled by a gate pulse supplied to the unit, or a built-in integral discriminator to eliminate any noise that may appear along with the input pulses. Other specifications of importance are the minimum time separation between the leading edge of two logic pulses in order that they be counted as separate events (the pulse pair resolving time) and the maximum counting rate at which the counter may be driven.
Timers The function of a timer is simply to start and stop the accumulation period for an electronic counter or other recording device. Obviously its most important property is the precision to which the time interval is controlled. Two general methods of control are commonly encountered. The simplest and least expensive method is to base the timing interval on the frequency of the alternating current of the power line to which the unit is connected. The precision of the timing is therefore determined solely by the accuracy and stability of the power line frequency. Utility companies usually do a good job of controlling the accuracy of the power line frequency when integrated over a day or more in order to maintain the accuracy of clocks also synchronized to the line frequency. On the other hand, the frequency may wander substantially over short periods of time, and timers based on·power line synchronization thus may give rise to substantial timing interval errors if the interval is less than a few hours. In order to guarantee better accuracy, timers based on internal crystal-controlled circuits are preferred for more exacting measurements. The most important specification in this case then becomes the stability of the timing frequency to changes in temperature.
I.. Counting Rate Meter In some situations it is advantageous to have a visual indication of the rate at which pulses are being counted in the system. counter in which the experimenter visually observes the rate at which counts are accumulated. Because of the random spacing between nuclear events, small changes in counting rate are difficult to observe in this way, particularly at low counting rates. A counting rate meter provides a more direct means of indicating the rate at which pulses are being accumulated. In its most common form, a rate meter can be represented by the diode pump circuit outlined in FIg. 17.10. The output stage of the logic device driving the rate meter is represented by the voltage generator and series output impedance Rf . Each logic pulse, as it enters the circuit, deposits a small fixed amount of charge on the storage capacitor Cr- This capacitance is also continuously discharged by a current that flows through the resistance R. If the rate of arrival of logic pulses is constant, an equilibrium will eventually be established in which the rate of charge deposition on the capacitor is just equal to the rate of its discharge through the resistance. Equilibrium is reached after several values of the time constant of the circuit have elapsed following an increase or decrease in the rate. This time constant is given simply by the product of the capacitance Ct and the parallel resistance R.
If the conditions shown in the figure are met, the average voltage appearing at the out“ put of the circuit is v = iR = QrR = CFrR (17.2) where r is the average rate at which pulses are supplied to the circuit, and Q is the charge deposited per pulse given by the product of the coupling capacitor Cf and the pulse ampli“ tude V. This output voltage is therefore proportional to the rate of arrival of the input logic pulses. If the input pulses were regularly spaced in time, the output voltage would have the appearance sketched in Fig. 17.l1a. Longer time constants result in a more nearly constant signal, but the response to abrupt changes in rate will be slower. The full-scale range of the meter is normally varied by selecting the value of R with a front-panel control. Other ratemeter circuits have been developed ll that provide an output proportional to the logarithm of the count rate. These meters allow compression of the counting rate scale so that several decades may be monitored without the inconvenience of switching between scales. When dealing with events from a radiation detector, the spacing between pulses is irregular and fluctuations in the output voltage arise as a result of the random variation in‘ spacing. The rate meter signal then has an appearance typical of that sketched in Fig. 17.llb. The standard deviation (J' of this signal can be defined as the square root of the variance of the values derived by sampling the signal many times at random and may be derived as follows. The differential contribution to the output voltage produced by a rate r during the time between t and t + dt is (QrICI) dt. Because C1 is continuously discharged through R, the importance of this contribution decreases exponentially with time and at a later time to is multiplied by a factor exp[-(to - t)fRCt ]. Similarly, the differential contribution to the standard deviation is (QICI)Vrdt with an importance that also decreases exponentially with time
F. Deadtime in Counting Systems An important consideration in many counting applications is the loss of events due to the:! dead time of the system. For some detectors (notably the G-M tUbe) the detector mechllinism itself limits the minimum interval between events for which two distinct pulses can b~counted. More often, however, the detector will be capable of producing pulses that are s~ arated by a time that is less than the dead time inherent in the operation of an electroni£component in the signal chain, and therefore it will be this component that determines the system dead time. In the simple counting systems shown in Fig. 17.7, this limiting component is usually the integral discriminator or the SCA Although there are many exceptions, thEl' dead time of a discriminator or SCA is typically related to the width of the linear pulse pre-! sented to its input and is characteristically a microsecond or two larger than this width. The validity of the corrections for dead time losses discussed in Chapter 4 depends oUlt the assumption that the dead time is constant for all events. The inherent dead time of elec.."; tronic units can sometimes vary with the amplitude or shape of the input pulse, so that steptt to set the dead time artificially are warranted in some critical applications. In this approach,‘ the dead time is standardized by an element such as a linear gate, which is held closed for a: fixed period of time following each pulse. This time is chosen to be larger than the dead time of any component in the system, so that accurate corrections can be made, even under con~ ditions in which wide variations in pulse amplitude are encountered. The dead time of this element may also be measured conveniently by direct observation on an oscilloscope.
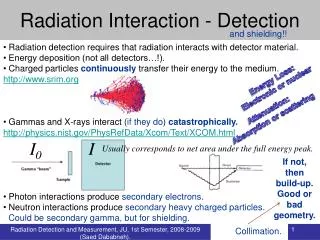
10.8 COINCIDENCE-ANTICOINCIDENCE MEASUREMENTS In radiation measurements it is desirable or necessary to discard the pulses due to certain types of radiation and accept only the pulses from a single type of particle or from a particle or particles coming from a specific direction. Here are two examples of such measurements: 1. Detection of pair-production events. When pair production occurs, two 0.511-MeV gammas are emitted back-to-back. To insure that only annihilation photon are counted, two detectors are placed 180" apart, and only events that register simultaneously (coincident events) in both detectors are recorded. 2. Detection of internal conversion electrons. Radioisotopes emitting internal conversion (IC) electrons also emit gammas and X-rays. The use of a single detector to count electrons will record not only IC electrons but also Compton electrons produced in the detector by the gammas. To eliminate the Compton electrons, one can utilize the X-rays that are emitted simultaneously with the IC electrons. Thus, a second detector is added for X-rays and the counting system is required to record only events that are coincident in these two detectors. This technique excludes the detection of Compton electrons.
For example, consider a coincidence measurement involving two detectors (Fig. 10.42). The detector signals are fed into a coincidence unit, which then is used to gate the corresponding ADCs. The amplified detector pulses that are coincident are thus digitized by the ADCs, and the information is stored in the memory of the system. Any event that reaches the memory is defined like a point in a two-dimensional space. For example, if a pulse from ADC1 has the value 65 (i.e., ADC channel 65) and one from ADC2 has the value 18, the event is registered as 6518 (assuming 100 channels are available for each parameter). The measured data may be stored in the computer, for subsequent analysis, and may also be displayed on the screen of the monitor for an immediate preliminary assessment of the results. The results of a dual-parameter system such as that shown in Fig. 10.42.