Download
1 / 32
320 likes | 385 Views
This project aims to develop a lightweight device to measure the position of a mouse head without interfering with testing conditions. Three design options include Optical, Ultrasound, and Magnetic techniques, each with distinct advantages and disadvantages.

E N D
Mouse Head Position and Orientation Team Members: Heather Waldeck Meghan Olson Andrea Zelisko Yao Lu Ben Sprague Missy Haehn
Advisor: Professor John Webster Client: Matthew I. Banks, Ph.D.Department of AnesthesiologyUniversity of Wisconsin
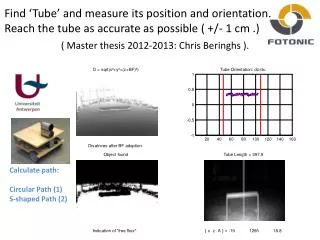
Problem Statement: To develop a lightweight device to measure the position of a mouse head. The device would be used during an experiment and must not interfere with the testing.
Background Information: • Sound waves elicit vibrations in cochlea • The basilar membrane transfers sound waves into neural signals. • If sound is repeated we learn the frequency pattern and can recognize that sound • Sound location determined from wave phase and time differences.
Background Information • Different sounds trigger different neural pathways. • Neural pathways are crucial in sound perception. • GABAA receptors facilitate inhibition of neural excitation. • Inhibitory activities play important role in perception and cognition of auditory stimuli.
Research • Our client studies perception and cognition of auditory system in mice. • Measures brain waves of mice in response to sound stimuli. • Position and orientation of head relative to speaker will affect brain activity • Specifically studying the effects of drugs on perception and cognition in mice
Design Specifications • <$5,000 • Does not interfere with current equipment • <1 gram on head • Does not pose danger to mouse and testers • Must work with in conditions of cage • Easy to use (minimal calibration) • < 1 cm x 1 cm
Design Team 1 • Presenters: Meghan Olson • Ben Sprague • Overview • Design Options • Optical • Ultrasonic • Magnetic • Design Matrix • Proposed Design
Design 1: Optical • Polaris Development Kit • 2 wireless infrared light emitters placed strategically placed on head • Infrared light sensor placed outside cage, within line of sight of entire cage • Sensor connected to computer, interpreting signal with designed software
Advantages • Easy system to use with well developed software • Little adjustment of product to make it work in this design setting • Wireless emitters of light, so less restricting on subject Disadvantages • Expensive in comparison to other designs • Require line of sight between emitters and sensor at all times • Continual improvements and updates to technology continuing
Design 2: Ultrasound • Two transmitters on head, at least three receivers around cage • Voltage or time measured at receivers • Can calculate distance from receivers • Can calculate angle from two signals of the head
Advantages • Operates in a reasonable frequency (40 kHz) • Cost efficient • Feasible • Gives position and orientation Disadvantages • Interference from bouncing signals • Not light enough • May be difficult to process signals
Design 3: Magnetic • Magnetic fields will produce current in wire • Use Honeywell sensors • ± 90° and ± 45 ° • ~$5 each • Have sensor grid underneath cage • Two or Three small magnets on the mouse head • Measure magnitude of voltage • Need amplifier circuits
Advantages • Lightweight • Cost effective • Easy to use • No wires on mouse Disadvantages • May affect/affected by existing instrumentation • Positioning algorithm • Affect brain sensors or mouse?
Considerations • How many sensors? • Where to position sensors and magnets (how far apart?) • How does mouse movement affect voltage readings • How to connect to computer • Parallel Port • Interface
References • NDI. http://www.ndigital.com/polaris.html. October 2nd, 2003 • Mass – Air/ Ultrasonic. http://www.massa.com/air_products.htm. September 29, 2003. • Honeywell SSEC. http://www.ssec.honeywell.com/magnetic/products.html. October 4, 2003.
Design Team 2 • Presenters • Missy Haehn • Heather Waldeck • Outline of Design Options • Magnetic Sphere • LED • Electrical Potential
Option 1: Magnetic Ball • How it works • Sphere with magnet is on mouse head • Lengthening and direction of force correlates with position • Ability to measure orientation • Disadvantages • Calibration needed • Weight
Option 2: LED How it works: • Sound for exp. is emitted and the LED pulses • Pulse detected by light sensors (receiver) • Position determined by sensors • Voltage output generated for analyzation Disadvantages: • Precise, but 2-D position • Light sensors must surround entire cage
Option 3: Electric Potential • How it works • 3 conducting spheres with specific charges and positions above mouse head • Measure electric potential • V = ke( q1/r1 + q2/r2 + q3/r3 ) • Ability to measure head orientation • Disadvantages • Interference • Need additional known variable
Final Choice: Electric Potential + LED • Magnetic Ball design too heavy • LED design only produced 2-D position • Electric Potential design had too many unknowns to solve Solution: Combine Electric Potential with LED • 3 different known charges and an LED on mouse’s head • Voltmeter and light sensors together determine position and orientation of mouse’s head • Two methods of sensing result in accurate, 3-D data
Future Work • Reduce interference • Insulation • Investigate and test sensors • Voltmeter and light • Determine appropriate charges • Create appropriate electrical potential • Find way to correlate different voltages • Software
Design Team 3 • Presenters • Yao Lu • Andrea Zelisko • Design Overview • Acoustic (Ultrasound) Tracking • Optical Tracking • Magnetic Tracking
Acoustic (Ultrasound) Tracking • Direct Measurement • Time-of-flight • Two transmitters • Different frequency • Three receivers for each transmitter (Auer et al)
Mouse’s Head with four passive LEDs Illumination External Infrared Source Reflection Camera Optical Tracking • Four passive LEDs • Camera in fixed location • External Infrared source • Continuous tracking (position, orientation) (Baratoff andBlanksteen)
Magnetic Tracking • Source composed of 3 coils of wire perpendicular to each other. • Magnetic field due to coils. • Sensor detects strength of field. (“Sensing in VR”)
Proposed Design: Optical • Advantages: • Lightweight • Does not interfere with brain wave recording • Easiest to assemble • Potential Problem: • Output data may be interfered by obstruction in line of sight. • Solved by ensuring camera cannot be blocked.
Future Works • Research and finalize the proposed design • Decide on components • Build device • Test device
References • Barafoff, G., Blanksteen, S. “Tracking Devices.” Accessed: September 29, 2003. URL: http://www.hitl.washington.edu/scivw/EVE/I.D.1.b.TrackingDevices.html • Auer, V., Bonfim, M.J.C., Lamar M.V., Maes M.M., Wanderley M.M. “3D Positioning Acquisition System with Application in Real-Time Processing.” Accessed: October 1, 2003. URL: http://www.ircam.fr/equipes/analyse-synthese/wanderle/gestes/externe/ICSPAT96.pdf • “Sensing in VR”. Accessed September 17th, 2003. URL http://www.cybertherapy.info/pages/sensing.htm.