Download
1 / 55
570 likes | 797 Views
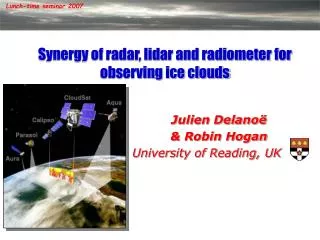
Synergy of Raman Lidar and Microwave Radiometry for High Vertically Resolved Temperature and Water Vapor Profiles. WWOSC 2014 Montreal, 17 th August 2014 María Barrera Verdejo 1 , Susanne Crewell 1 , Ulrich Löhnert 1 , Bjorn Stevens 2 , Emiliano Orlandi 1 , Paolo Di Girolamo 3

E N D
Synergy of Raman Lidar and Microwave Radiometry for High Vertically Resolved Temperature and Water Vapor Profiles WWOSC 2014 Montreal, 17th August 2014 María Barrera Verdejo1, Susanne Crewell1, Ulrich Löhnert1, Bjorn Stevens2, Emiliano Orlandi1, Paolo Di Girolamo3 1Universität zu Köln, Cologne, Germany, 2Max-Planck-Institut fürMeteorologie, Hamburg, Germany, 3Università della Basilicata, Potenza, Italy
Abs. Humidity + uncertainties • MWR TBs
Abs. Humidity + uncertainties Abs. Humidity + uncertainties
Abs. Humidity + uncertainties Abs. Humidity + uncertainties
Abs. Humidity + uncertainties Abs. Humidity + uncertainties
Abs. Humidity + uncertainties Rel. Humidity + uncertainties Abs. Humidity + uncertainties
Integrated Profiling Technique (IPT) Inversion OPTIMALESTIMATION Avariational approach towards multi-instrument retrieval Löhnert et al., 2004 and 2008
Optimal Estimation Scheme • A priori information, xa, Sa • Radiosondes climatology • Measurements, y, Se • Lidar temp and humidity profiles • TB from MWR • Atmospheric retrieved parameters, x=[T,q] • Temperature and humidity profiles Rodgers 2000
Optimal Estimation Scheme • A priori information, xa, Sa • Radiosondes climatology • Measurements, y, Se • Lidar temp and humidity profiles • TB from MWR • Atmospheric retrieved parameters, x=[T,q] • Temperature and humidity profiles Rodgers 2000
Optimal Estimation Scheme • A priori information, xa, Sa • Radiosondes climatology • Measurements, y, Se • Lidar temp and humidity profiles • TB from MWR • Atmospheric retrieved parameters, x=[T,q] • Temperature and humidity profiles Rodgers 2000
Optimal Estimation Scheme • A priori information, xa, Sa • Radiosondes climatology • Measurements, y, Se • Lidar temp and humidity profiles • TB from MWR • Atmospheric retrieved parameters, x=[T,q] • Temperature and humidity profiles Rodgers 2000
Optimal Estimation Scheme FForward models Rodgers 2000
Optimal Estimation Scheme KiJacobian represents the variation in the forward model if a layer is perturbed FForward models Rodgers 2000
Abs. Humidity + uncertainties Abs. Humidity + uncertainties
Scatter plots 500 m 1.5 km 5 km LIDAR MWR BOTH
Scatter plots 500 m 1.5 km 5 km LIDAR MWR BOTH
Theoretical error SYNERGY IMPROVEMENT
Temperature+ uncertainties Rel. Humidity + uncertainties Abs. Humidity + uncertainties
Temperature+ uncertainties • Improvement of the algorithm: • Include temperature • Extend to cloudy cases • Apply algorithm to Barbados data Rel. Humidity + uncertainties
Humidity and Atmospheric Profiler (HATPRO) • Passive instrument measuring thermal emission expressed as brightness temperatures (TB) • 7 channels from 22.235 - 31.4 GHz7 channels from 51.3 – 58.8 GHz • Statistical retrieval of T, q profiles, Liquid Water Path (LWP) and Integrated Water Vapor (IWV) • Rain sensor, GPS, clock • Noise in TB depends on channel band width and integration time. • Absolute calibration: LN2 and/or tipping curves. Precision ~ 0.5 K SUNHAT at Barbados Cloud Observatory. Max Planck Institute. Mentor: María Barrera Verdejo.
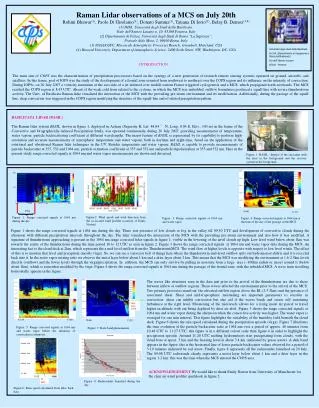
Basil Lidar • Nd:YAG laser. Fundamental, Second and Third Harmonic Generation • Elastic channels: 1064, 532 and 355 nm • Nitrogen (387 nm) and water vapor (408 nm) • Profiles of backscatter coefficient, particle depolarization and particle extinction. • Daytime measurements more noisy than nighttime operation. • Water vapor mass mixing ratio from Raman channels • Temperature, water vapor • Calculation of relative humidity. • Calibration using RS Hamburg lidar at Barbados Cloud Observatory. Max Planck Institute.
A priori information: xa, Sa Xa • Pprof_aver • Tprof_aver • Qprof_aver (and their standard deviations) • Improvements: take closest RS