Download
1 / 33
360 likes | 503 Views
Socio-Cognitive Robot Architectures. An Exploratory Overview. 15-12-2010. Lorentz Centre HART Workshop. work in progress. Koen V. Hindriks. Contact : k.v.hindriks@tudelft.nl Webpage : http://mmi.tudelft.nl/SocioCognitiveRobotics. Goal of this presentation.

E N D
Socio-Cognitive Robot Architectures An Exploratory Overview 15-12-2010 Lorentz Centre HART Workshop work in progress Koen V. Hindriks Contact: k.v.hindriks@tudelft.nl Webpage: http://mmi.tudelft.nl/SocioCognitiveRobotics
Goal of this presentation • Collect your feedback about some preliminary ideas about designing / developing a socio-cognitive robot control architecture • I’d also like to collect some lessons learned based on your robot development experience; e.g. which pitfalls should be avoided. • Please jump in! I’d appreciate teamwork ;-)
Overview • Exploratory overview of cognitive robot control architectures • Basic Abstract Architecture Design • Summarizing: Current understanding of some key challenges
TowardsSocio-Cognitive Robot Architectures • Challenge for cognitive architectures: real time autonomous processing needed to interact with dynamic world we live in. • Need for socio-cognitive architectures pushed by humanoid robots that interact with humans in a multi-modal fashion. • Towards an architecture for social interaction and teamwork • Klein, G., Woods, D. D., Bradshaw, J. M., Hoffman, R. R., & Feltovich, P. (2004). Ten challenges for making automation a "team player" in joint human-agent activity. IEEE Intelligent Systems 19(6): 91-95. • Here we look at various current state-of-the-art approaches, and take cognitive robot architectures as a starting point.
Cognitive Robot Control Architectures An Exploratory (and Necessarily Brief) Overview
A Plethora of Architectures • Subsumption architecture (Brooks 1985) • BDL (Rochwerger et al. 1994) • RAP (Firby 1994) • TCA (Simons et al. 1997). • SSS (Connell 1991) • ATLANTIS (Gat 1991) • 3T (Bonasso 1991) • Saphira (Konolige 1996) • CLARAty (Volpe et al 2001) • CoSy schemas (Hawes et al 2007) • Soar • ACT-R (SS-RICS, …) • ADAPT • …
Stanford Cart Architecture TypesPipeline Architectures • Based on a horizontal decomposition of functional components Vision Model Plan Execute Control Robot Platform Sensors Motors Environment • Classic architecture, also used for symbolic robot control architectures. • Potential to exploit parallelism, but hard and (typically?) not used in practice.
Architecture TypesBehavior-Based Architectures Hannibal(MIT AI Lab) • Based on a vertical decomposition of behavior components filter filter Behavior 4, e.g. Build Map Behavior 3, e.g. Explore Behavior 2, e.g. Avoid obstacle Behavior 1, e.g. Wander Robot Platform Sensors Motors Environment • Components are in competition, run in parallel and outputs are filtered by some technique. • Reactive architectures typically do not support cognitive functions and seem to have a “capability ceiling” (Gat 1998).
Alfred B12 Architecture Types3T or Layered Architectures • Based on a vertical decomposition of components Deliberator (High-level layer; planning, reasoning, …) Sequencer (Middle layer; conditional sequencing, sequencing constructs/language) Controller (Low-level layer; skills, feedback control loops) Robot Platform Sensors Motors Environment • Classic examples: SSS (Connell 1991), ATLANTIS (Gat 1991), 3T (Bonasso 1991) • High-level typically declarative techniques, low-level typically procedural techniques
Rationalizing 3T Architectures • Erann Gat (1998) rationalized three-layer architectures by arguing there is a correspondence between layers and the role of internal state. • Deliberator: state reflecting predictions about the future • Sequencer: state reflecting memories about the past • Controller: no state (stateless sensor-based algorithms) • Responsiveness, time scale also varies over components.
BIRON • The Bielefeld Robot Companion (2004)
Care-O-bot 3 (Fraunhofer IPA, 2008) Instruction model Care-O-bot II/3 (FF) (MySQL) (JAM Agents) (Realtime Framework; RTF)
Armar Armar (Univ. of Karlsruhe) Low-level can also access GKB
Saphira Architecture “No overt planning” No third (high-level) layer LPS = Local Perceptual Space
Observations: • No standard no leverage of robotics’ community efforts • Issues: • “not invented here” • “fear of unknown” • “learning curve” • … • Observation: • 3T: • dominant layer? • access to info? • obscures hierarchy within layers • Two layers blend declarative and procedural techniques CLARAty Architecture • Two-layered architecture developed at JPL/NASA • CLARA = Coupled Layered Architecture for Robotic Autonomy
B21r + Katana arm CoSy Architecture Schema Need for easy methods for linking modules using different forms of representation, without excessive run-time overhead integration mechanisms = architectural schema + binding information
Key Problem: Integration Challenge Observation: • Over time more and more components have been integrated into cognitive robot architectures. Q: • How many layers? • A Socio-Cognitive Architecture only adds to this challenge. Any ideas / approaches for effective design approaches for integrating e.g. new components for social interaction and coordination both with humans and other robots?
Key Problem: Access to Data/Information/KB Observation: • After classical 3T architectures, all cognitive robot architectures have a common database shared by all layers Q: • Which data needs to be shared? Mainly localization information? • It seems that all three-layered architectures require sharing of data by all layers. Do 2-layered architectures require this?
Well-defined Robot Architecture A well-defined architecture facilitates reuse and parallel development Q: • Do general software architectural principles apply? • What is a well-defined robot architecture? Any criteria? Example principles: • partition architecture into layers with well-defined interfaces • partition code into functional blocks with well-defined inputs and outputs • …
Basic Abstract Architecture Design Reducing the complexity?
Abstract Architecture (1/2) • Based on a vertical decomposition into functional layers Cognitive Layer Behavioral Layer P1 P2 … B1 B2 … Robot Platform Sensors Motors Environment • P1, P2, … = process 1, process 2, …; B1, B2, … = behavior 1, behavior 2, … • Cognitive functions supported in cognitive layer, e.g. reasoning, planning, memory, …
Abstract Architecture (2/2) • Simple interface between cognitive and behavioral layer Cognitive Layer Stop … Activate … … behavior Override … Symbolic representations Behavioral Layer P1 P2 … B1 B2 … • …
Emotion expression using gestures Which emotion is expressed?
The End • I reached the end ;-) • Any additional questions comments suggestions ?
TODO • TeradaEtAl2008, A Cognitive Robot Architecture based on Tactile and Visual Information • Architectures don’t discuss plan repair, …?
GOAL Agent Programming Language GOAL agent program Programming… …with mental models GOAL agent architecture See also: http://mmi.tudelft.nl/~koen/goal.html.
DOD Levels of Autonomy http://www.fas.org/irp/program/collect/uav_roadmap2005.pdf
Tooth: http://www.kipr.org/robots/tooth.html • Rocky III: http://www.kipr.org/robots/rocky.html • Herbert: http://www.ai.mit.edu/projects/mobilerobots/veterans.html • Robbie: http://www.magneticpie.com/LEGO/roverHistory/roverSize.html • B12 (Alfred): http://srufaculty.sru.edu/sam.thangiah/B12Robot.htm
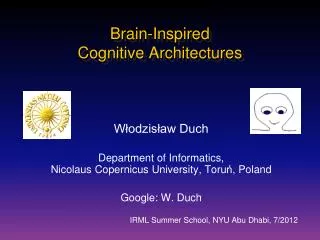
Cognitive Architectures Overview Soar Scott D. Hanford, Oranuj Janrathitikarn, and Lyle N. Long, 2009, Control of Mobile Robots Using the Soar Cognitive Architecture
ACT-R 6.0 Current Goal Declarative Memory Modify Retrieve Check Test Pattern Matching And Production Selection Identify Object Check State Schedule Action Move Attention Motor Modules Perceptual Modules Environment ACT-R 6.0 Architecture
Cognitive Architectures Overview SS-RICS (2006) • SS-RICS = Symbolic and Subsymbolic Robotics Intelligence Control System • An extension of ACT-R • U.S. Army Research Laboratory, Aberdeen (Kelley and Avery)
Cognitive Architectures Overview ADAPT (2004) • ADAPT (Benjamin, Lyons, and Lonsdale 2004) Benjamin, P., Lyons, D., and Lonsdale, D., “Designing a Robot Cognitive Architecture with Concurrency and Active Perception,” Proceedings of the AAAI Fall Symposium on the Intersection of Cognitive Science and Robotics, October, 2004.