Download
1 / 1
10 likes | 188 Views
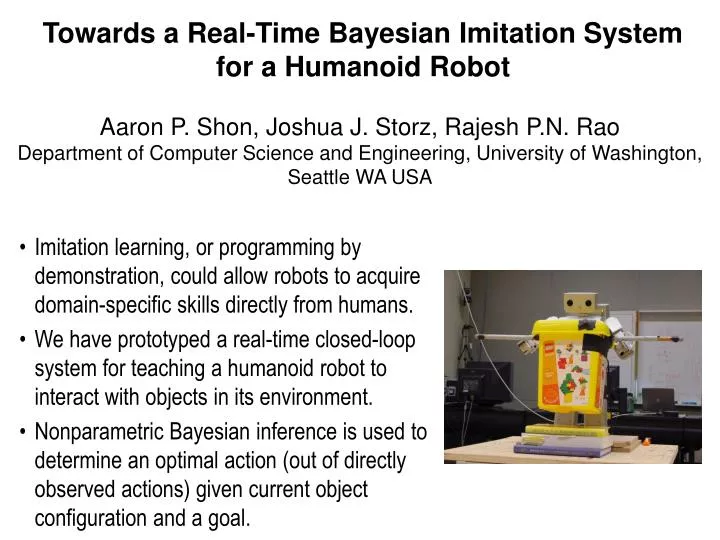
Towards a Real-Time Bayesian Imitation System for a Humanoid Robot. Aaron P. Shon, Joshua J. Storz, Rajesh P.N. Rao Department of Computer Science and Engineering , University of Washington, Seattle WA USA.

E N D
Towards a Real-Time Bayesian Imitation System for a Humanoid Robot Aaron P. Shon, Joshua J. Storz, Rajesh P.N. RaoDepartment of Computer Science and Engineering, University of Washington, Seattle WA USA • Imitation learning, or programming by demonstration, could allow robots to acquire domain-specific skills directly from humans. • We have prototyped a real-time closed-loop system for teaching a humanoid robot to interact with objects in its environment. • Nonparametric Bayesian inference is used to determine an optimal action (out of directly observed actions) given current object configuration and a goal.