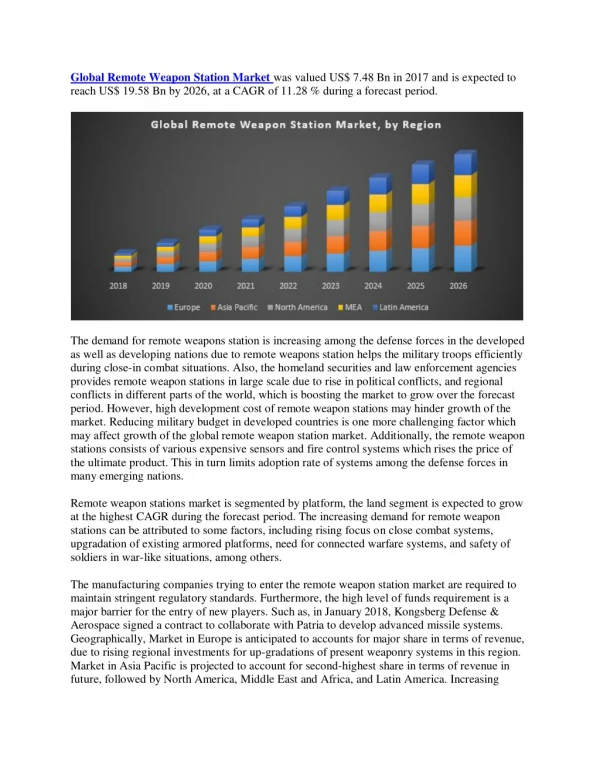
Download
1 / 61
610 likes | 704 Views
Master thesis in EISLAB Author : Romain SERIZEL Director : Jerry LINDBLOM. Remote Measurement station for fishes detection. Summary. Introduction System purpose Hardware Overview of the previous software Problems to solve Conclusion. Introduction. Master thesis on « SLU » project

E N D
Master thesis in EISLAB Author : Romain SERIZEL Director : Jerry LINDBLOM Remote Measurement station for fishes detection
Summary • Introduction • System purpose • Hardware • Overview of the previous software • Problems to solve • Conclusion
Introduction • Master thesis on « SLU » project • Remote Measurement station for fishes detection • Based on an already working project
Introduction : Goals • Find the « bugs » and solve them • Improve system stability • Make sure the system can work « alone » • Provide some information on the system status • Avoid collisions on I²C bus
System purpose Based on Imanol Beguiristáin’s work
System purpose Stages in the sampling techniques carried out by SLU: 1st Stage: Manual System • Radio-Receiver mounted in an aeroplane.
System purpose Stages in the sampling techniques carried out by SLU: 1st Stage: Manual System • Radio-Receiver mounted in an aeroplane. 2nd Stage: Automatic System • Radio-Receiver + Data Collection Computer
System purpose Stages in the sampling techniques carried out by SLU: 1st Stage: Manual System • Radio-Receiver mounted in an aeroplane. 2nd Stage: Automatic System • Radio-Receiver + Data Collection Computer 3rd Stage: Remote Measurement Station • Advance in the sampling process
System purpose 1) Specific Embedded Internet System 2) R.MS. data User 3)Change station’s parameters.
System purpose User (SLU) GPRS Network Internet R.M.S Advantages : Less displacements Less time and money spent
Hardware Based on Imanol Beguiristáin’s work
Hardware Hardware within R.M.S. GEIC Board of communications The biotelemetry equipment
Hardware : GEIC • 2 PIC 18F452 (32KB rom 1,5KB ram) • 1 LCD screen • EEPROM 24LC256 (256K) • Temperature sensor lm75 • Connector DB9 • Connector euro50
Hardware : Communication board Module Falcom C2D-SI: • GPS receiver • GSM / GPRS module • SIM card reader • 2 inputs for antennas • 60 pins connector
Hardware : Biotelemetry equipment Data Collection Computer (DCC) • It includes a configuration program • Process data and save it into memory • Data registered: • Date - time • Frequency, nº of pulses, signal strength Radio-Receiver (RR): • Scan the frequencies programmed in DCC • Detect pulses emitted by salmons’ transmitters • Frequency range: 151.000 MHz - 151.999 MHz
Hardware : Biotelemetry equipment Transmitters: • Light (12 grams) and small (40x19x9 mm) • Emit pulses at a certain frequency • External attached
Existing software Based on Imanol Beguiristáin’s work
Existing software : Overview Software embedded within the PICs RMC, salmon data PIC2 PIC1 nº salmons GPS Fish detections Web Server Download WebPages to EEPROM
Existing software : PIC1 - GPS GPS receiver configuration: Serial transmission baudrate 38400 bps Protocol NMEA Output messages format RMC Allow to obtain: • Date and time fish detection • Location station’s location • GPS status valid / invalid
Existing software : PIC2 - protocols Application HTTP Transport TCP Network IP Data link PPP Physical GPRS
Existing software : Communication between PICs Communication through I²C bus : PIC1 : • Read fish information (master) • Send data to the PIC2 (master) PIC2 : • Read temperature (master) • Access EEPROM (master) • Receive data from PIC1 (slave)
Existing software : Communication between PICs Communication through I²C bus : PIC1 : • Read fish information (master) • Send data to the PIC2 (master) PIC2 : • Read temperature (master) • Access EEPROM (master) • Receive data from PIC1 (slave) Need a protocol to avoid collisions !!!
Existing software : Communication with R.M.S Telia assigns private IP to R.M.S within GPRS network: • User can not access directly to webserver EISLAB server: • Public IP • Application responsible of: • Accept TCP connections from R.M.S and user • Redirect frames
Existing software : Communication with R.M.S Public Server (EISLAB) data.htm data.htm GET data.htm GET data.htm PPP GPRS Network Internet User (SLU) R.M.S. EISLAB server • Public IP address: 130.240.26.132 • Port of communication with user: 8180 • Port of communication with R.M.S: 4000
problems to solve : PIC1 • Add a time backup to know the last good GPS time • Add methods to print information on the LCD through PIC2 • Send a « dummy-fish » to indicate that a fish is leaving area • Synchronize all I²C access to reduce risk of collisions
problems to solve : PIC2 • Display status on LCD • Receive PIC1 status and display it on LCD • Restart the microcontroller if there is too long inactivity on I²C • Introduce fish status flag (1 = in, 2 = left, 0 = no new information)
problems to solve : PIC2 - PPP • PPP is using escape character • To avoid misunderstanding, replace these if use in upper layers
problems to solve : PIC2 - PPP • PPP is using escape character • To avoid misunderstanding, replace these if use in upper layers It was not the case for some headers (tcp, ip) Almost 1 frame/5 was not received by the server
problems to solve : PIC2 - PPP • PPP is using escape character • To avoid misunderstanding, replace these if use in upper layers It was not the case for some headers (tcp, ip) Almost 1 frame/5 was not received by the server The solution : Replace the escape characters in the headers (tcp, ip) also.
problems to solve : PIC2 - TCP No action when the server receive a frame : • 04 (reset) • 11 (end)
problems to solve : PIC2 - TCP No action when the server receive a frame : • 04 (reset) • 11 (end) Solution : restart the connection when it happen
problems to solve : PIC2 - TCP No action when the server receive a frame : • 04 (reset) • 11 (end) Solution : restart the connection when it happen If a frame is not arriving to EISLAB server, it keep asking for it « for ever ». It can lock the server.
problems to solve : PIC2 - TCP No action when the server receive a frame : • 04 (reset) • 11 (end) Solution : restart the connection when it happen If a frame is not arriving to EISLAB server, it keep asking for it « for ever ». It can lock the server. Solution : fix a timeout, if we receive no acknowledgement after that time, restart the connection.
problems to solve : PIC2 - HTTP Problems with the authentication : • Sometimes the password is good but get rejected by server • Once someone is connected, every can connect without authentication
problems to solve : PIC2 - HTTP Problems with the authentication : • Sometimes the password is good but get rejected by server • Once someone is connected, every can connect without authentication The solution : Remove the authentication. As the IP is private every users have to go through EISLAB server and authenticate there.
problems to solve : Web site Light version of the Web site to reduce data flow : 662B 463B
problems to solve : Web site • Include fish status flag management : • To reduce useless data flow • To allow increasing the number of fishes displayed
problems to solve : Web site • The R.M.S is now connected to a system which include : • The “forwarding server” as used before • Digester (Web browser emulator) • Database • Personal home pages
problems to solve : Web site • The R.M.S is now connected to a system which include : • The “forwarding server” as used before • Digester (Web browser emulator) • Database • Personal home pages • Need to respect format so digester can parse data.