Download
1 / 19
190 likes | 303 Views
SBC2013-14689: Un-Tethered, Active Ankle-Foot Orthotic. Rochester Institute of Technology Rochester, NY. The Team. Team Members: Pattie Schiotis – Team Manager (ME) Shane Reardon – Lead Engineer (ME) Dana Kjolner (EE) Robert Ellsworth (EE) Sam Hosig (CE) John Williams (CE)

E N D
SBC2013-14689:Un-Tethered, Active Ankle-Foot Orthotic Rochester Institute of Technology Rochester, NY
The Team • Team Members: • Pattie Schiotis – Team Manager (ME) • Shane Reardon – Lead Engineer (ME) • Dana Kjolner (EE) • Robert Ellsworth (EE) • Sam Hosig (CE) • John Williams (CE) • Faculty Guide: Dr. Elizabeth DeBartolo
Agenda • Introduction • Project Background • Key Customer Needs • System Architecture • Component Breakdown • Mechanical Locking System • Electronics Circuit and PCB • Sensors • Microcontroller • Testing Results • Future Work • Demo
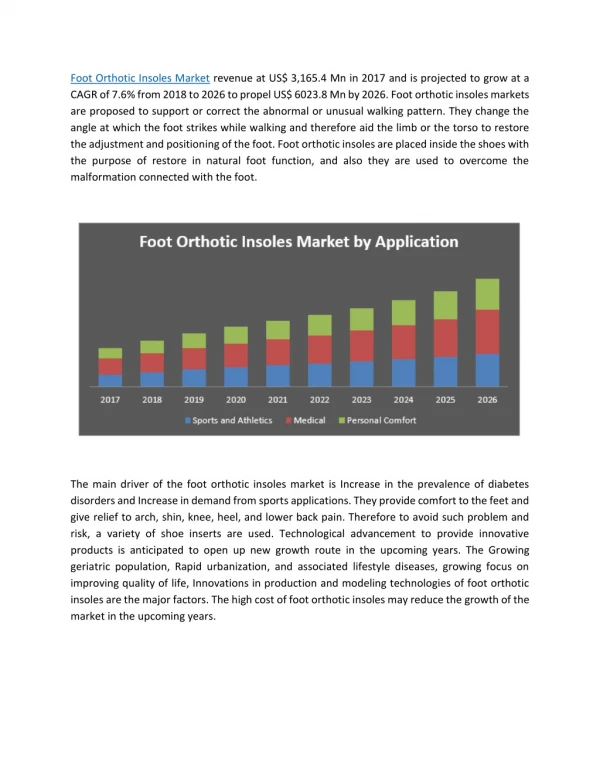
Project Background: Foot Drop • Inability to dorsiflex the foot due to loss of control of peroneal nerve • Lasting side effect of a stroke, affecting approximately 20% of stroke survivors • ~20 million people per year • Condition can also occur as a side effect of ALS (Lou Gherig's Disease), Multiple Sclerosis, or injury to the peroneal nerve, increasing the number of people affected • People with this condition have difficulty maintaining a proper gait cycle • “Foot crash”
Project Background: AFO Market • Patients have adopted the use of ankle foot orthotics (AFOs) to aid with dorsi flexion • Market consists mostly of “passive” devices • Rigid braces which prevent unwanted plantar flexion. Foot is always pointed in the upwards direction. • These devices do not allow for safe maneuvering down stairs and ramps • The goal of this project is to design and develop an “active” AFO which allows safe movement on flat surfaces as well as up and down stairs and ramps
Assumptions & Constraints • User will have no ability to either plantar-flex or dorsi-flex their foot • Side to side stability of the foot will be ignored • Worst case will be analyzed: • 95 percentile male having heavy foot. • Fast walker – gait cycle less than 1 second. • Device may not use air muscles as an actuation source • AFO Custom made for each client
Key Customer Needs • Safety • Portable • Lasts all day without charging/refueling • Lightweight • Tolerable to wear all day • Reliable • Accommodates Flat Terrain • Accommodates Special Terrain • Stairs • Ramps • Obstacles • Comfortable • Aesthetically Pleasing • Durable • Water Resistant • Corrosion Resistant • Salt & Environment • Biocompatibility • Convenient • Easy to put on and take off Primary Needs: Secondary Needs:
System Architecture • CAD model Reservoir Sensors Battery Processor Valve Piston/Cylinder Mounting Bracket
Mechanical Locking System Concept: Selectively prevent foot from plantar flexing while off the ground • Piston-cylinder arrangement attached posterior to heal and calf via 2 pin joints • Piston actuates within cylinder as dorsi & plantar flexion occurs
Mechanical Locking System • Valve on top of the cylinder is closed • Water inside cylinder is compressed by piston upon plantar-flexion • Motion of piston is therefore restricted, preventing plantar flexion • Valve is open • Water is free to travel between cylinder and reservoir upon actuation of piston • Allows for plantar and dorsi flexion “Locked” Mode “Free” Mode
Electronic Circuit and Board Design Connector LED SD Card Switch
Sensors • Utilize sensor system developed by MS student Christopher Sullivan • Vertical sensor determines if the foot is on or off ground • Forward sensors detects upcoming terrain
Microcontroller • Processing path of microcontroller
Testing Results • Range of Motion • 70.03º-147.27º • Weight of Device • 2.42 lbs • Terrain prediction • Detects flat, descending stairs and ramps • System Response Time • Average ~300ms
Areas of Improvement • Create smaller electronics box • Reduce weight, improve aesthetics, switch in correct location • Different battery • Reduce size and weight, improve usage time • Recommend using plastic fittings • Weight reduction, corrosion resistance, could not find in store • SD card expansion board • Improve data collection • Human Trials with AFO that fits user • More accurate data collection
Economic Feasibility • Budget breakdown…