Download
1 / 23
230 likes | 420 Views
Statistical methods and weather based decision making in meteorological support for Unmanned Aerial Vehicles. F.Wantuch, Z.Bottyán, Z.Tuba, K.Hadobács. The aim.

E N D
Statistical methods and weather based decision making in meteorological support for Unmanned Aerial Vehicles F.Wantuch, Z.Bottyán, Z.Tuba, K.Hadobács
The aim. We proposed to set up a complex, aviation meteorological support system which is able to provide weather information for planning and operating UAV flights anytime, anywhere. Our work is based on the freely available meteorological reports (METARs) therefore this system is easily adaptable. The support system contains aviation climatological calculations, statistical methods and numerical weather prediction (NWP) model outputs.
Statistical method – the four main pillars • 1. The database-using half-hourly meteorological observations and reports (METARs). • 2.climatological statistics for the different parameters (horizontal visibility, ceiling, wind direction and speed, etc.) and flight categories for wanted time and place. • 3. Outputs of the widely used WRF NWP model give the third pillar. Besides raw model outputs there are analogmethod based on climate statistics was applied for the estimation of occurrence of different weather phenomena. The analog weather situations can play an important role in the weather prediction for the UAVs. • 4. The fourth pillar.Our system can determine optimal flight paths of UAVs. In this context optimal flight path means the safest route in the 3D atmospheric environment which can contain hazardous weather situations.
The first pillar. • The data base -using half-hourly meteorological observations and reports (METARs).
Pillar 2. • We represent examples for Szolnok (LHSN), Hungary. We highlight only some more interesting results because of size restriction. • The UAVs are usually very sensible for stronger winds due to their physical dimensions. It is practical to filter the conditional wind direction distributions for speed categories.
Pillar 2. Relative frequency of wind direction when the wind speed is over a given value.
Pillar 2. Advective fog - Relative frequency of wind direction when the wind speed is over 3 m/s and fog occurs.
Pillar 2. Diurnal variation of relative frequency of different ceiling categories in January.
Pillar 2. Successive relative frequencies of different ceiling categories at the given initial condition
Pillar 3.- To find the similar case To find the most similar combinations in the database available we use our own supporting software. To define the similarity we used earlier publications and our own test results, too . We had defined the similarity criteria for each examined meteorological elements and we summed up of the individual similarity measures.
Pillar 3, - an example • At 06:15UTC 23 January 2013 in Szolnok (LHSN) Hungary: METAR LHSN 230615Z 27005MPS 0800 +SN BKN005 OVC017 M02/M03 Q1006 NOSIG RMK AMB=. This means westerly wind (5MPS), heavy snow (+SN) with quiet poor visibility (800m), low level ceiling (500 feet), temperature is -2°C, dew point is -3°C and the sea level pressure is around 1006hPa. With the application of mentioned averaging method we had found 07:45UTC 03 January 2010 for the most similar case: METAR LHSN 030745Z 31004MPS 0800 SN BR BKN006 OVC015 M02/M02 Q1012 NOSIG RMK AMB=
Pillar 3. Successive visibility values of the observed (05:45 UTC 23 January 2013) and the most similar case in Szolnok (LHSN), Hungary.
Pillar 3. Successive visibility values of the observed (05:45 UTC 23 January 2013) and the hourly average values of the ten most similar case in Szolnok (LHSN), Hungary.
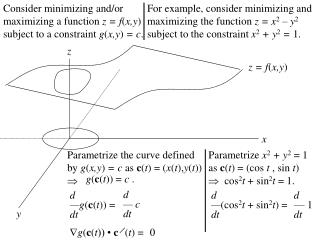
Pillar 4. • The general purpose of a UAV operation is to get a given UAV from point A(departure) to point B (destination)and to complete its mission during the flight. To support a successful mission we need to determine the exact flight path with minimizing the weather impact on the UAV during its flight. The weather conditions for every time step and every grid point are available as direct (e.g. temperature, wind speed, etc.) and derived (e.g. turbulence, icing, etc.) outputs of high resolution NWP models such as WRF .
Pillar 4. • Categories were established for each aeronautical hazardous weather element (e.g. icing is not expected; weak, moderate or heavy icing may occur, etc.) • A numeric value is assigned to each of these categories so the higher number means the greater danger. This categorization was performed to each item, and their sum represents the total risk value. • The higher this sum means the more aggregate phenomena and more dangerous encounters would happen during the UAVs flight. • These values were calculated for each grid points of the NWP model.
Pillar 4. An example-Howwecandeterminetheoptimalaltitude ? 13 27 6 32 The minimum:46 16 27 8 31 9 16 26
Pillar 4. • A flight will be completed most safely in meteorological aspect if the UAV is able to fly in such a route when the sum of the assigned values during the whole trip should be the lowest one. • We can determine the route depending to the optimal weight. • Detailed mathematical description is in the paper.
Pillar 4. Test in the practice Optimal and dangerous route along a 15 stage graph at altitude 2250 m. During a test in the 10 March, 2010 we had a 15 stage system. We were able to determine the optimal flight path in each altitude and we had found that the optimal altitude was 2250 m and the most dangerous one was at 1800 m AGL.
Conclusion Our aim is to develop a complex UAV flight support system. We took into account the climate characteristics of the take-off or landing location. Analogous method was used to find the most similar weather situation to the in-flight condition during the UAV flight. We could estimate the frequency of weather elements (e.g. fog, precipitation) or probability of different weather intervals regarding to visibility or wind. To ensure flight safety NWP model output was used. In connection with the UAV flights the most frequently asked question is which the best altitude and route of the aircraft is. A number was calculated to assign for each grid point of weather model which characterizes the risk of all kind of dangerous events.
Conclusion • Method applied in this paper is able to define from meteorological point of view the optimal route and level of the flight. The practical usage of the above detailed procedure and statistical methods were successfully tested in some cases of UAV flights. • We could estimate the frequency of weather elements (e.g. fog, precipitation) or probability of different weather intervals regarding to visibility or wind.
Conclusion • To ensure flight safety NWP model output was used. In connection with the UAV flights the most frequently asked question is which the best altitude and route of the aircraft is. A number was calculated to assign for each grid point of weather model which characterizes the risk of all kind of dangerous events. • Having changed the input parameter values of the numerical and statistical models the developed decision support tools can be used anywhere in the world.
Thank you for your attention! http://images3.jetphotos.net, http://www.aviationexplorer.com