Download
1 / 17
180 likes | 431 Views
ISAT 303 Module II Electromechanical Actuators. The objectives of this module are to understand the concept of actuation . learn about types of actuators from the simple on/off switch to servo motor drives. understand the physics and applications of stepper motors .

E N D
ISAT 303 Module IIElectromechanical Actuators • The objectives of this module are to • understand the concept of actuation. • learn about types of actuators from the simple on/off switch to servo motor drives. • understand the physics and applications of stepper motors. • learn how to control output speed and position in a closed loop to create a desired motion profile. • learn how to select a stepper motor for a particular load level
Actual Output Desired Output Controller Actuator Plant or System Sensor Actuators:What are They? • Actuators are devices which accept a small control signal to produce a large effect in the system output. • Actuator Types: electrical, mechanical (hydraulic or pneumatic) • Electrical: On/off switches and motors
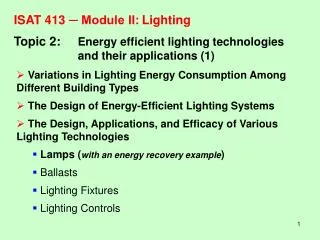
4-Way control valve Fluid flowing from the cylinder Cylinder Working fluid from and to pump Work being actuated (pushed) Piston Fluid flowing to the cylinder Mechanical Actuators:Hydraulic and Pneumatic Cylinders Hydraulic cylinder: working fluid is liquid Pneumatic cylinder: working fluid is air
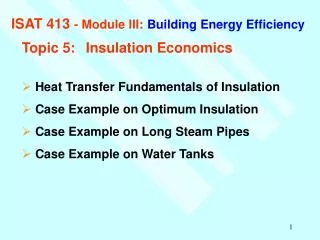
When electro-magnet is energized, contacts close and deliver power to the load + Electro-magnet Actuators:On/Off Switches • Electromechanical switches (relays): a low voltage control signal energizes a electromagnetic coil which closes a switch to close or open a high voltage (or current) circuit. Return spring • Programmable limit switches: to produce a regular sequence of on/off conditions. • Alarms/Annunciators: for monitoring process conditions and sounds an alarm if a pre-set condition is reached.
Drive Pros Cons Typical Use Motor Drives: Types, Pros and Cons StepperMotor DC Motor AC (brushless) • Lowest cost • Compact size • Digital control • Limited power • Small payload • Low efficiency • Moderate conditions • Low speed • Easy to design • Easy to maintain • Quiet operation • Complex implementation • Motor adds inertia load • High power • Inertial loads (high torque) • Very high speed • Hazardous use • No maintenance • high speed • Low maintenance • Largest payload • Require bulky & costly inverters • Cost the most
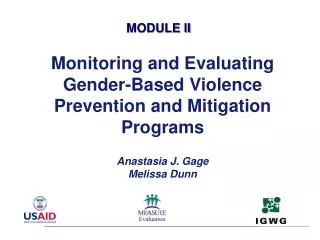
N S Torque Starting and stopping limit “L-curve” Max. speed limit “U-curve” Slew zone Stepping Rate (speed) Motor Drives: Steppers Fundamentals • Convert a series of input pulses (steps) into a proportional angular movement. • The motor shaft position is determined by the pulse count and its speed by the pulse rate. • The permanent magnet rotor is propelled by successively energizing peripheral electromagnets (stator poles or windings). • Motor must start and stop in the start & stop zone, but can operate in the slew zone. Start & Stop zone
T (oz.in) 200 U Load 70 L 8 VU 4 V (103 steps/s) VL Motor Drives: Steppers Fundamentals Example: A constant load torque of 70 oz.in is supplied by a stepper motor with following approximate torque-speed relations: L-curve: T (oz.in) = 200 - 0.050 V(steps/s) U-curve: T (oz.in) = 200 - 0.025 V(steps/s) Find: (a) Maximum allowable starting speed and running speed (b) Starting time if the motor runs 13 pulses at the max starting speed Solution: (a) The maximum starting speed VL is determined by equating the load torque to the supply torque given in the L-equation: 70 = 200 – 0.05 VL or VL = 2600 steps/s The maximum running speed VU is similarly determined. VU =5200 steps/s (b) During the starting period, the speed (or frequency) is 2600 steps/s; thus t = (no. of steps) / (steps/s) = 13 steps / 2600 steps/s = 5 ms.
Stepper Motor:Current Variations • The pole windings are wired into two separate sections called phases. The phases are sometimes divided further into two parts. Phases allow for many variations in current patterns: • Full-step current: both phases are always energized • Half-step current: the two phases are not always energized (most common) • Standard 2-phase 200-step stepper motor • 50 teeth on each of the two rotor pole sections • stator has 8 poles each with 5 teeth • current in stator pole windings is sequenced to allow 1/4 tooth “effective” rotor rotation per step which results in the 200 steps.
Step Switch Set Direction Motor Stepper Motors: Drives • The drive is a separate section in the motor system. The drive responds to speed and position control commands by delivering appropriate electrical current to the motor to achieve the desired motion. • The translator section of the drive translates the step and direction signal into a set of pole switches to sequence the rotor movement. Phase 1 Stepper Drive Subsystem Translator Phase 2
Torque “U-curve” Speed Stepper Motors: Performance Curves • Torque/speed curves are called motor performance curves. • These curves are the fundamental indicators of dynamic (motion and power) behavior. They specify combinations of torque and speed for safe operation. • At low speed, output torque depends on drive current setting. • At high speeds, output current depends on drive supply voltage. Input pulse Motor Current
Series Torque Parallel Parallel Series Speed Stepper Motors: Performance Curves • The two windings halves in an 8-lead 200-step stepper motor can be connected either in series or in parallel. • The series connection doubles the number of winding turns and increases the output torque at low speeds, but reduces it at high speeds due to 4-fold increase in inductance.
Motor Load varies with speed Torque Constant Load Speed Speed Time Motor Selection:Design Considerations Motor and Load Characteristics • Motor torque/speed supply characteristics • Load torque/speed requirements • Load and motor inertia • Friction • Torque operating margin (>50%) • Duty cycle Duty Cycle
Tt Tf Ta Motor Selection:Dynamic Considerations • Motor torque must overcome friction and inertia: Total torque = Friction torque + Acceleration torque Tt = Tf + Ta • The friction torque, Tf is a constant to be determined experimentally. Motor Load m, J • The acceleration torque, Tadepends on the moment of inertia J (oz-in2) and angular acceleration a (rad/s2): Ta = Ja
Const. speed, wmax Accelerate a = wmax/Dt1 Decelerate a = -wmax/Dt3 Speed, w Dt1 Dt3 Time, t Motor Selection:Kinematic (Motion Profile) Considerations • In most positioning applications, a typical cycle of movement can be represented with a trapezoidal motion profile. • The cycle begins with a constant acceleration stroke, continues with a constant velocity stroke and ends with a constant deceleration segment. • Angular acceleration, speed and displacement are related by similar equations to linear motion. Dt2 Linear Angular v = v0+ atw = w0 + at d =vot + at2/2q = wot + at2/2 v2 = vo2 + 2adw2 = wo2 + 2aq
Motor Maximum Operating torque Torque Tm >0.5 Tt Continuous load torque Tt wmax Speed, w Motor Selection:Continuous Torque Requirement • At a given maximum operating angular speed, the motor torque must be at least 1.5 times the required continuous load torque. • The total required load torque Ttis computed from the known friction torque and the time Dt required to accelerate to wmax. Given: Tf = 12 oz-in wmax = 10 rps = 10 rev/s Dt = 0.2 s Jtot = 50 oz-in2 Find: Total load torque Minimum motor torque at wmax
Stepper Motor: PROBLEM SOLUTION = max/t = (10 rev/sec)/0.2 sec) = 50 rev/sec2 = 50 rev/sec2(2 rad/rev) = 100 rad/sec2 TT = TF + T and TF was given as 12 oz-in. T = J* = 50 oz-in2(100 rad/sec2) T = 50 oz-in2(100 rad/sec2)(1/386 in/sec2)# T = 40.7 oz-in TT = TF + T = 12 + 40.7 = 52.7 oz-in = total load torque Minimun Motor Torque at max =1.5 TT = 1.5(52.7) =79.1 oz-in. #conversion factor for converting gravitational units(in/s2) to units of mass(oz-in2) • The pole windings are wired into two separate sections called phases. The phases are sometimes divided further into two parts. Phases allow for many variations in current patterns: • Full-step current: both phases are always energized • Half-step current: the two phases are not always energized (most common) • Standard 2-phase 200-step stepper motor • 50 teeth on each of the two rotor pole sections • stator has 8 poles each with 5 teeth • current in stator pole windings is sequenced to allow 1/4 tooth “effective” rotor rotation per step which results
Stepper Motor:APPLICATIONS • COMPUTER PERIPHERALS • FLOPPY DISC-POSITION MAGNETIC PICKUP • PRINTER-CARRIAGE DRIVE • BUSINESS MACHINES • CARD READER-POSITION CARDS • COPY MACHINE-PAPER FEED • PROCESS CONTROL • IN-PROCESS GAGING-PART POSITIONING • I.C. BONDING-CHIP POSITIONING • MACHINE TOOL • MULTI-AXIS MACHINES-X-Y-Z POSITIONING • GRINDING MACHINES-AUTO WHEEL DRESSING • The pole windings are wired into two separate sections called phases. The phases are sometimes divided further into two parts. Phases allow for many variations in current patterns: • Full-step current: both phases are always energized • Half-step current: the two phases are not always energized (most common) • Standard 2-phase 200-step stepper motor • 50 teeth on each of the two rotor pole sections • stator has 8 poles each with 5 teeth • current in stator pole windings is sequenced to allow 1/4 tooth “effective” rotor rotation per step which results