Download
1 / 20
200 likes | 379 Views
CeNCOOS Glider Activities. Francisco Chavez Senior Scientist Monterey Bay Aquarium Research Institute. Glider/AUV Activities. Spray glider continuously along CalCOFI Line 67 in collaboration with Davis and Rudnick –Scripps

E N D
CeNCOOS Glider Activities Francisco Chavez Senior Scientist Monterey Bay Aquarium Research Institute
Glider/AUV Activities • Spray glider continuously along CalCOFI Line 67 in collaboration with Davis and Rudnick –Scripps • Support deployments of 2 NPS Spray and 1 Webb glider – time and data available to CeNCOOS • Support deployments of 2 UCSC Webb gliders – time and data available to CeNCOOS • Work collaboratively with Teledyne-Webb on development of deep gliders – data collected available to CeNCOOS • Work collaboratively with Liquid Robotics on payloads for Wave Glider • Work with MBARI on AUV developments
Glider applications • Climate/models • HABs • Biogeochemical cycles • Ocean acidification/hypoxia • Internal tides/sediment resuspension
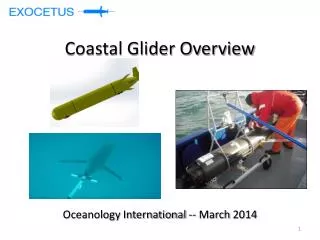
CeNCOOS region “feels” large scale/global variations in climate Gliders good tools to track variations in climate, feed models
Glider deployment strategies • Continuous (lines – how long, grids – scale) • Process experiments • Rapid response
Existing and proposed glider operations In support of climate change, modeling, process studies, HABs, etc. data in near real time
MBARI Ocean Acidification (OA) mooring – NSF support . Wave Glider equipped with the same OA sensors
Satellite sea surface temperature Upwelling Relaxation
Very large gradients (as large as global means) observed on order of a kilometer CO2 pH Atmosphere Wave glider observations of pCO2 and pH
A Spectrum of Vehicles 2011 100 kg Multiple operation modes >1000 km at 1 m/s >3000 km at 0.5 m/s >1 month Late ’90s >500 kg Carry many sensors at 1.5 m/s, but only lasts on order a day. Spray Early ’00s 48 kg Can run for months, but can only carry a few sensors, and goes quite slowly (0.3 m/s). LRAUV Jim Bellingham, MBARI
Ship LRAUV Glider
Future • 2012 – samplers for particles and water, adaptive sampling, patch budgets Under development by MBARI (Scholin, Bellingham) now Long range AUV
How do mobile platforms fit into the big picture? Regularly spaced Rapid focused response Observations Basic Ecosystem Rules Model Predictions of climate change Physical modification, unexpected events Modify behavior Managing our oceans Adaptation Mitigation No action