Download
1 / 17
170 likes | 387 Views
PHYS16 – Lecture 23. Ch. 10 & 11 Rotation. Ch. 10 & 11 Rotation. Angular Motion Angular displacement, velocity, & acceleration Constant acceleration problems Angular Inertia Angular Energy Rotational Kinetic Energy Angular Force & Torque Angular Momentum & Collisions.

E N D
PHYS16 – Lecture 23 Ch. 10 & 11 Rotation
Ch. 10 & 11 Rotation • Angular Motion • Angular displacement, velocity, & acceleration • Constant acceleration problems • Angular Inertia • Angular Energy • Rotational Kinetic Energy • Angular Force & Torque • Angular Momentum & Collisions
Rotation pre-question • You are unwinding a large spool of cable. As you pull on the cable with a constant tension and at a constant radius, what happens to αand ω? • Both increase as the spool unwinds • Both decrease as the spool unwinds • αincreases and ω decreases • αdecreases and ω increases • αstays constant and ω increases
Rotation pre-question • An ice skater spins with his arms extended and then pulls his arms in and spins faster. Which statement is correct? • His kinetic energy of rotation does not change because energy is conserved • His kinetic energy of rotation increases because angular velocity increases • His kinetic energy of rotation decreases because rotational inertia is decreasing
Aside on Cross Product • Cross product or Vector product – a way to multiply two vectors to get a vector • Right-hand Rule gives direction I like to use curling hand instead… wikipedia
Torque • Torque (τ) – a force that acts at a distance causing rotation • Units = Joules = Nm • Vector quantity, direction given by right hand rule wikipedia
Torque and Angular Acceleration • F=ma so the angular equivalent would be τ=Iα • Is this true?
Example: Jet turbine • The turbine of a jet engine has a moment of inertia of 25 kg∙m2. If the turbine is accelerated uniformly from rest to an angular speed of 150 rad/s in a time of 25 s, what is the torque? If the turbine is 1.0 m long, what is the force required?
Demo: Unrolling a spool • When you pull the cable to the left, which way does the spool go? What happens to inertia of spool as unravel? What happens to ang. velocity? What happens to ang. acceleration? University of Maryland Physics Demonstration Facility
Demo: Riding a tricycle • When you pull cable to the left, which way does the trike go? University of Maryland Physics Demonstration Facility
Angular Momentum • Angular momentum (L) – momentum of a rotating object • Cross product like the dot product is a way to multiply vectors, except cross product gives vector not scalar • Direction of cross product is given by right hand rule
Angular Collisions • Angular momentum is conserved if there are no external torques • Example: Kid jumps onto spinning merry go round, Person on a spinning chair is handed a spinning bicycle wheel, ice skater in a spin…
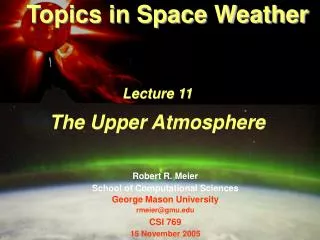
Discussion Question: Ice Skating • In a spin, why do ice skaters decrease their angular velocity when they hold their arms out? Kristi Yamaguchi L=Iω Holding arms out increases I. If L stays the same, and I increases then ω decreases. What about Kinetic Energy? http://www.corbisimages.com/images/67/7760610C-6DF3-4A39-ACD6-C3CDEFF73296/PN015983.jpg
Conclusions • Parameters for circular motion/ rotation basically have linear equivalents • θ is related to x, ω is related to v, α is related to a • I is related to m • Krotationalis related to K • L is related to p, L=Iω=rpsin(θ) • τ is related to F, τ=Iα =rFsin(θ)