Download
1 / 26
270 likes | 561 Views
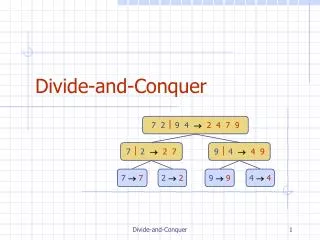
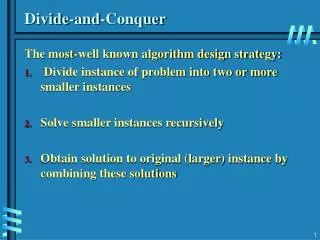
0. Divide and Conquer. The most well known algorithm design strategy: Divide instance of problem into two or more smaller instances Solve smaller instances recursively Obtain solution to original (larger) instance by combining these solutions. 0. Divide-and-conquer technique.

E N D
0 Divide and Conquer The most well known algorithm design strategy: • Divide instance of problem into two or more smaller instances • Solve smaller instances recursively • Obtain solution to original (larger) instance by combining these solutions
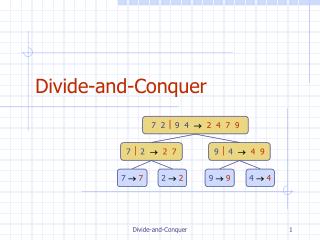
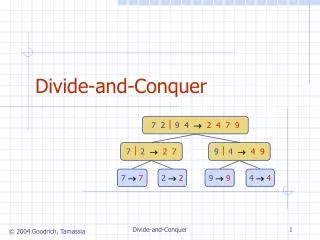
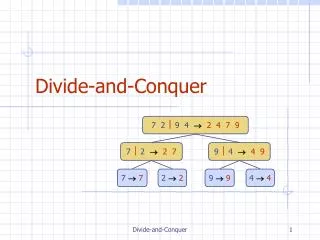
0 Divide-and-conquer technique a problem of size n subproblem 1 of size n/2 subproblem 2 of size n/2 a solution to subproblem 1 a solution to subproblem 2 a solution to the original problem
0 Divide and Conquer Examples • Sorting: mergesort and quicksortO(n2) O(n log n) • Closest-pair algorithmO(n2) O(n log n) • Matrix multiplication Strassen’sO(n3) O(nlog 7) = O(n2.8) • Convex hull-QuickHull algorithmO(n3) O(n2 log n)
0 General Divide and Conquer recurrence: T(n) = aT(n/b) + f (n)where f (n)=Θ(nk) • a < bk T(n) =Θ(nk) • a = bk T(n) =Θ(nk lg n ) • a > bk T(n) =Θ(nlog b a)
0 Efficiency of mergesort • All cases have same time efficiency: Θ( n log n) • Number of comparisons is close to theoretical minimum for comparison-based sorting: log (n !) ≈ n log n - 1.44 n • Space requirement: Θ( n ) (NOT in-place) • Can be implemented without recursion (bottom-up)
p 0 Quicksort • Select a pivot (partitioning element) • Partition the list into two halves • First half: Items less than the pivot • Second half: Items greater than the pivot • Exchange the pivot with the last element in the first half • Sort the two sublists A[i]≤p A[i]>p
Efficiency of quicksort • Best case: split in the middleΘ( n log n) • Worst case: sorted array!Θ( n2) • Average case: random arraysΘ( n log n)
Efficiency of quicksort • Improvements: • better pivot selection: median of three partitioning avoids worst case in sorted files • switch to insertion sort on small subfiles • elimination of recursion these combine to 20-25% improvement • Considered the method of choice for internal sorting for large files (n ≥ 10000)
Efficiency of QuickHull algorithm • If points are not initially sorted by x-coordinate value, this can be accomplished in Θ( n log n) — no increase in asymptotic efficiency class • Other algorithms for convex hull: • Graham’s scan • DCHull also in Θ( n log n)
Closest-Pair Problem: Divide and Conquer • Brute force approach requires comparing every point with every other point • Given n points, we must perform 1 + 2 + 3 + … + n-2 + n-1 comparisons. • Brute force O(n2) • The Divide and Conquer algorithm yields O(n log n) • Reminder: if n = 1,000,000 then • n2 = 1,000,000,000,000 whereas • n log n = 20,000,000
Closest-Pair Algorithm Given: A set of points in 2-D
0 Closest-Pair Algorithm Step 1: Sort the points in one D
0 Closest-Pair Algorithm Lets sort based on the X-axis O(n log n) using quicksort or mergesort 4 9 13 6 2 14 11 7 3 10 5 1 8 12
0 Closest-Pair Algorithm Step 2: Split the points, i.e., Draw a line at the mid-point between 7 and 8 4 9 13 6 2 14 11 7 3 10 5 1 8 12 Sub-Problem 1 Sub-Problem 2
0 Closest-Pair Algorithm Advantage: Normally, we’d have to compare each of the 14 points with every other point. (n-1)n/2 = 13*14/2 = 91 comparisons 4 9 13 6 2 14 11 7 3 10 5 1 8 12 Sub-Problem 1 Sub-Problem 2
0 Closest-Pair Algorithm Advantage: Now, we have two sub-problems of half the size. Thus, we have to do 6*7/2 comparisons twice, which is 42 comparisons solution d = min(d1, d2) 4 9 13 d1 6 2 d2 14 11 7 3 10 5 1 8 12 Sub-Problem 1 Sub-Problem 2
0 Closest-Pair Algorithm Advantage: With just one split we cut the number of comparisons in half. Obviously, we gain an even greater advantage if we split the sub-problems. d = min(d1, d2) 4 9 13 d1 6 2 d2 14 11 7 3 10 5 1 8 12 Sub-Problem 1 Sub-Problem 2
0 Closest-Pair Algorithm Problem: However, what if the closest two points are each from different sub-problems? 4 9 13 d1 6 2 d2 14 11 7 3 10 5 1 8 12 Sub-Problem 1 Sub-Problem 2
0 Closest-Pair Algorithm Here is an example where we have to compare points from sub-problem 1 to the points in sub-problem 2. 4 13 d1 6 2 d2 9 14 11 7 3 10 8 5 1 12 Sub-Problem 1 Sub-Problem 2
0 Closest-Pair Algorithm However, we only have to compare points inside the following “strip.” d = min(d1, d2) 4 9 d d 13 d1 6 2 d2 14 11 7 3 10 5 1 8 12 Sub-Problem 1 Sub-Problem 2
0 Closest-Pair Algorithm Step 3: But, we can continue the advantage by splitting the sub-problems. 4 9 13 6 2 14 11 7 3 10 5 1 8 12
0 Closest-Pair Algorithm Step 3: In fact we can continue to split until each sub-problem is trivial, i.e., takes one comparison. 4 9 13 6 2 14 11 7 3 10 5 1 8 12
0 Closest-Pair Algorithm Finally: The solution to each sub-problem is combined until the final solution is obtained 4 9 13 6 2 14 11 7 3 10 5 1 8 12
0 Closest-Pair Algorithm Finally: On the last step the ‘strip’ will likely be very small. Thus, combining the two largest sub-problems won’t require much work. 4 9 13 6 2 14 11 7 3 10 5 1 8 12
0 Closest-Pair Algorithm • In this example, it takes 22 comparisons to find the closets-pair. • The brute force algorithm would have taken 91 comparisons. • But, the real advantage occurs when there are millions of points. 4 9 13 6 2 14 11 7 3 10 5 1 8 12
0 Closest-Pair Problem: Divide and Conquer • Here is another animation: • http://www.cs.mcgill.ca/~cs251/ClosestPair/ClosestPairApplet/ClosestPairApplet.html