Download
1 / 59
590 likes | 729 Views
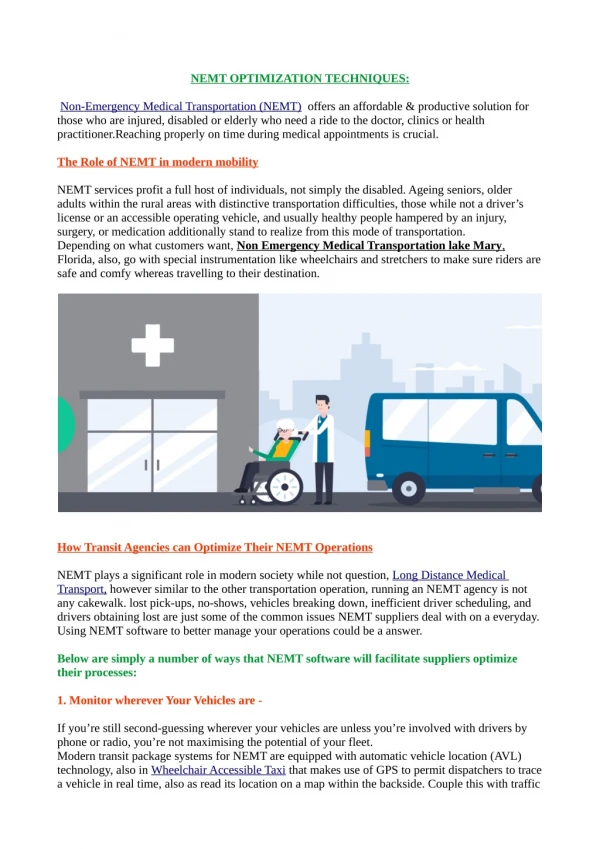
C Optimization Techniques for StarCore SC140. Created by Bogdan Costinescu. Agenda. C and DSP Software Development Compiler Extensions for DSP Programming Coding Style and DSP Programming Techniques DSP Coding Recommendations Conclusions. What do optimizations mean?.

E N D
C Optimization Techniques for StarCore SC140 Created by Bogdan Costinescu
Agenda • C and DSP Software Development • Compiler Extensions for DSP Programming • Coding Style and DSP Programming Techniques • DSP Coding Recommendations • Conclusions
What do optimizations mean? • reduction in cycle count • reduction in code size • reduction in data structures • reduction in stack memory size • reduction of power consumption • how do we measure if we did it right?
Why C in DSP Programming? • C is a "structured programming language designed to produce a compact and efficient translation of a program into machine language” • high-level, but close to assembly • large set of tools available • flexible, maintainable, portable => reusability
Compiler-friendly Architectures • large set of registers • orthogonal register file • flexible addressing modes • few restrictions • native support for several data types
Example - StarCore SC140 • Variable Length Execution Set architecture • one execution set can hold up to: • four DALU instructions • two AGU instructions • scalable architecture with rich instruction set • large orthogonal register file • 16 DALU • 16 + 4 + 4 AGU • short pipeline => few restrictions • direct support for integers and fractionals
Is C a Perfect Match for DSPs? • fixed-point not supported • no support for dual-memory architectures • no port I/O or special instructions • no support for SIMD instructions • vectors represented by pointers
C Support for Parallelism • basically, NONE • C = a sequential programming language • cannot express actions in parallel • no equivalent of SIMD instructions • the compiler has to analyze the scheduling of independent operations • the analysis depends on the coding style
Can C be made efficient for DSPs? YES, IF the programmer understands • compiler extensions • programming techniques • compiler behavior
Compiler Extensions • intrinsics • access efficiently the target instruction set • new data types • use processor-specific data formats in C • pragmas • providing extra-information to the compiler • inline assembly • the solution to “impossible in C” problem
Intrinsic functions (Intrinsics) • special compiler-translated function calls • map to one or more target instructions • extend the set of operators in C • define new types • simple and double precision fractional • extended precision fractionals • emulation possible on other platforms
Data Types • DSPs may handle several data formats • identical with C basic types • integers • common length, but different semantics • fractionals on 16 and 32 bits • particular DSP (i.e. including the extension) • fractionals on 40 bits • all DSP specific data types come with a set of operators
C Types for Fractionals • conventions: • Word16 for 16 bit fractionals • Word32 for 32 bit fractionals • Word40 for 40 bit fractionals (32 bits plus 8 guard bits) • Word64 for 64 bit fractionals (not direct representation on SC140) • intrinsics, not conventions, impose the fractional property on values
Fractional Emulation • needed on non-StarCore platforms • maintain the meaning of fractional operations • in some limit cases, the emulated results are not correct • e.g. mpysu uses 32-bits for results plus sign • special Metrowerks intrinsics to solve possible inconsistencies • e.g. mpysu_shr16
Fractional Values and Operators • introduced by fractional intrinsics • operators standardized (ITU-T, ETSI) • addition, multiplication • saturation, rounding • scaling, normalization • operate on specific data types Word16 add(Word16, Word16); Word32 L_add(Word32, Word32); Word40 X_add(Word40, Word40); Word64 D_add(Word64, Word64);
Pragmas • standard mode to speak with compilers • describe code or data characteristics • pragmas do not influence the correctness • but influence significantly the performance #pragma align signal 8 #pragma loop_unroll 4 #pragma inline #pragma loop_count (20, 40, 4)
Alignment pragma • #pragma align *ptr 8 • for parameters • #pragma align ptr 8 • for vector declaration and definition • derived pointers may not inherit the alignment Word16 *p = aligned_ptr + 24; /* not recommended */ #define p (aligned_ptr + 24) /* recommended */ • create a new function if you want to specify alignment for internal pointers
Inline Assembly • whole functions • only one instruction • asm(“ di”); • difficult access to local function symbols • global can be accessed by their name • the asm statements block the C optimization process
Inline Assembly • access to special target features not available through intrinsics • special calling convention • the programmer has more freedom • fast assembly integration with C • easy integration of legacy code • two types • one instruction, e.g. asm(“ di"); • a whole function
Inline Assembly - Example asm Flag GetOverflow(void) { asm_header return in $d0; .reg $d0,$d1; asm_body clr d0 ; extra cycle needed to allow DOVF to ; be written even by the instructions ; in the delay slot of JSRD bmtsts #$0004,EMR.L ; test the Overflow bit from EMR move.w #1,d1 tfrt d1,d0 ; if Overflow return 1, else return 0 asm_end }
Compiler Optimizations • standard C optimizations • low level (target) optimizations • several optimization levels available • fastest code • smallest code • global optimizations • all files are analyzed as a whole • the best performance
DSP Application Success Factors • high-performance, compiler-friendly target • good optimizing compiler • good C coding style in source code => the only factor tunable by the programmer is the C coding style • coding style includes programming techniques • no compiler can defeat from GIGO
Programming Techniques • described in the compiler’s manual • styles to be used • pitfalls to be avoided • explicitly eliminate data dependencies • complement compiler’s transformations that restructure the code
SC140 Programming Techniques • general DSP programming techniques • loop merging • loop unrolling • loop splitting • specific to StarCore and its generation • split computation • multisample
Loop Merging • combines two loops in a single one • precondition: the same number of iterations • may eliminate inter-loop storage space • increases cache locality • decreases loop overhead • increases DALU usage per loop iteration • typically, reduces code size
Loop Merging Example /* scaling loop */ for ( i = 0; i < SIG_LEN; i++) { y[i] = shr(y[i], 2); } /* energy computation */ e = 0; for ( i = 0; i < SIG_LEN; i++) { e = L_mac(e, y[i], y[i]); } /* Compute in the same time the */ /* energy of the scaled signal */ e = 0; for (i = 0; i < SIG_LEN; i ++) { Word16 temp; temp = shr(y[i], 2); e = L_mac(e, temp, temp); y[i] = temp; }
Loop Unrolling • repeats the body of a loop • increases the DALU usage per loop step • increases the code size • depends on • data dependencies between iterations • data alignment of implied vectors • register pressure per iteration • number of iterations to be performed • keeps the bit-exactness
Loop Unrolling Example int i; Word16 signal[SIGNAL_SIZE]; Word16 scaled_signal[SIGNAL_SIZE]; /* ... */ for(i=0; i<SIGNAL_SIZE; i++) { scaled_signal[i] = shr(signal[i], 2); } /* ... */ int i; Word16 signal[SIGNAL_SIZE]; #pragma align signal 8 Word16 scaled_signal[SIGNAL_SIZE]; #pragma align scaled_signal 8 /* ... */ for(i=0; i<SIGNAL_SIZE; i+=4) { scaled_signal[i+0] = shr(signal[i+0], 2); scaled_signal[i+1] = shr(signal[i+1], 2); scaled_signal[i+2] = shr(signal[i+2], 2); scaled_signal[i+3] = shr(signal[i+3], 2); } /* ... */
Compiler generated code ; With loop unrolling : 2 cycles inside ; the loop. ; The complier uses software pipelining [ move.4f (r0)+,d0:d1:d2:d3 move.l #_scaled_signal,r1 ] [ asrr #<2,d0 asrr #<2,d3 asrr #<2,d1 asrr #<2,d2 ] loopstart3 [ moves.4f d0:d1:d2:d3,(r1)+ move.4f (r0)+,d0:d1:d2:d3 ] [ asrr #<2,d0 asrr #<2,d1 asrr #<2,d2 asrr #<2,d3 ] loopend3 moves.4f d0:d1:d2:d3,(r1)+ ; Without loop unrolling : 6 cycles ; inside the loop loopstart3 L5 [ add #<2,d3 ;[20,1] move.l d3,r2;[20,1] move.l <_signal,r1 ;[20,1] ] move.l <_scaled_signal,r4 adda r2,r1 [ move.w (r1),d4 adda r2,r4 ] asrr #<2,d4 move.w d4,(r4) loopend3
Why to use loop unrolling? • increases DALU usage per loop step • explicit specification of value reuse • elimination of “uncompressible” cycles • destination the same as the source
Loop unroll factor • difficult to provide a formula • depends on various parameters • data alignment • number of memory operations • number of computations • possible value reuse • number of iterations in the loop • unroll the loop until you get no gain • two and four are typical unroll factors • found also three in max_ratio benchmark
Loop Unroll Factor – example 1 #include <prototype.h> #define VECTOR_SIZE 40 Word16 example1(Word16 a[], Word16 incr) { short i; Word16 b[VECTOR_SIZE]; for(i = 0; i < VECTOR_SIZE; i++) { b[i] = add(a[i], incr); } return b[0]; }
Loop Unroll Factor - example 2 #include <prototype.h> #define VECTOR_SIZE 40 Word16 example2(Word16 a[], Word16 incr) { #pragma align *a 8 int i; Word16 b[VECTOR_SIZE]; #pragma align b 8 for(i = 0; i < VECTOR_SIZE; i++) { b[i] = add(a[i], incr); } return b[0]; } ; compiler generated code move.4f (r0)+,d4:d5:d6:d7 ... loopstart3 [ add d4,d8,d12 add d5,d8,d13 add d6,d8,d14 add d7,d8,d15 moves.4f d12:d13:d14:d15,(r1)+ move.4f (r0)+,d4:d5:d6:d7 ] loopend3
Loop Unroll Factor - example 3 #include <prototype.h> #define VECTOR_SIZE 40 Word16 example3(Word16 a[], Word16 incr) { #pragma align *a 8 int i; Word16 b[VECTOR_SIZE]; #pragma align b 8 for(i = 0; i < VECTOR_SIZE; i++) { b[i] = a[i] >> incr; } return b[0]; } ; compiler generated code loopstart3 [ move.4w d4:d5:d6:d7,(r1)+ move.4w (r0)+,d4:d5:d6:d7 ] [ asrr d1,d4 asrr d1,d5 asrr d1,d6 asrr d1,d7 ] loopend3
Split Computation • typically used in associative reductions • energy • mean square error • maximum • used to increase DALU usage • increases the code size • may require alignment properties • may influence the bit-exactness
Split Computation Example int i; Word32 e; Word16 signal[SIGNAL_SIZE]; /* ... */ e = 0; for(i = 0; i < SIGNAL_LEN; i++) { e = L_mac(e, signal[i], signal[i]); } /* the energy is now in e */ int i; Word32 e0, e1, e2, e3; Word16 signal[SIGNAL_SIZE]; #pragma align signal 8 /* ... */ e0 = e1 = e2 = e3 = 0; for(i = 0; i < SIGNAL_LEN; i+=4) { e0 = L_mac(e0, signal[i+0], signal[i+0]); e1 = L_mac(e1, signal[i+1], signal[i+1]); e2 = L_mac(e2, signal[i+2], signal[i+2]); e3 = L_mac(e3, signal[i+3], signal[i+3]); } e0 = L_add(e0, e1); e1 = L_add(e2, e3); e0 = L_add(e0, e1); /* the energy is now in e0 */
How many splits? • depending on memory alignment • loop count should be multiple of number of splits • the split have to be recombined to get the final result • decision depends on the nesting level
Loop Splitting • splits a loop into two or more separate loops • increases cache locality in big loops • decreases register pressure • minimizes dependencies • may create auxiliary storage
Multisample • complex transformation for nested loops • loop unrolling on the outer loop • loop merging of the inner loops • loop unrolling of the merged inner loop • keeps bit-exactness • does not impose alignment restrictions • reduces the data move operations
Multisample Example - Step 1 for (j = 0; j < N; j += 4) { acc0 = 0; for (i = 0; i < T; i++) acc0 = L_mac(acc0, x[i], c[j+0+i]); res[j+0] = acc0; acc1 = 0; for (i = 0; i < T; i++) acc1 = L_mac(acc1, x[i], c[j+1+i]); res[j+1] = acc1; acc2 = 0; for (i = 0; i < T; i++) acc2 = L_mac(acc2, x[i], c[j+2+i]); res[j+2] = acc2; acc3 = 0; for (i = 0; i < T; i++) acc3 = L_mac(acc3, x[i], c[j+3+i]); res[j+3] = acc3; } Word32 acc; Word16 x[], c[]; int i,j,N,T; assert((N % 4) == 0); assert((T % 4) == 0); for (j = 0; j < N; j++) { acc = 0; for (i = 0; i < T; i++) { acc = L_mac(acc, x[i], c[j+i]); } res[j] = acc; } 1 2 Outer loop unrolling
Multisample Example - Step 2 for (j = 0; j < N; j += 4) { acc0 = 0; for (i = 0; i < T; i++) acc0 = L_mac(acc0, x[i], c[j+0+i]); res[j+0] = acc0; acc1 = 0; for (i = 0; i < T; i++) acc1 = L_mac(acc1, x[i], c[j+1+i]); res[j+1] = acc1; acc2 = 0; for (i = 0; i < T; i++) acc2 = L_mac(acc2, x[i], c[j+2+i]); res[j+2] = acc2; acc3 = 0; for (i = 0; i < T; i++) acc3 = L_mac(acc3, x[i], c[j+3+i]); res[j+3] = acc3; } 2 for (j = 0; j < N; j += 4) { acc0 = 0; acc1 = 0; acc2 = 0; acc3 = 0; for (i = 0; i < T; i++) acc0 = L_mac(acc0, x[i], c[j+0+i]); for (i = 0; i < T; i++) acc1 = L_mac(acc1, x[i], c[j+1+i]); for (i = 0; i < T; i++) acc2 = L_mac(acc2, x[i], c[j+2+i]); for (i = 0; i < T; i++) acc3 = L_mac(acc3, x[i], c[j+3+i]); res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } 3 Rearrangement
Multisample Example - Step 3 for (j = 0; j < N; j += 4) { acc0 = 0; acc1 = 0; acc2 = 0; acc3 = 0; for (i = 0; i < T; i++) acc0 = L_mac(acc0, x[i], c[j+0+i]); for (i = 0; i < T; i++) acc1 = L_mac(acc1, x[i], c[j+1+i]); for (i = 0; i < T; i++) acc2 = L_mac(acc2, x[i], c[j+2+i]); for (i = 0; i < T; i++) acc3 = L_mac(acc3, x[i], c[j+3+i]); res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } 3 Inner loop merging for (j = 0; j < N; j += 4) { acc0 = 0; acc1 = 0; acc2 = 0; acc3 = 0; for (i = 0; i < T; i++) { acc0 = L_mac(acc0, x[i], c[j+0+i]); acc1 = L_mac(acc1, x[i], c[j+1+i]); acc2 = L_mac(acc2, x[i], c[j+2+i]); acc3 = L_mac(acc3, x[i], c[j+3+i]); } res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } 4
Multisample Example - Step 4 for (j = 0; j < N; j += 4) { acc0 = 0; acc1 = 0; acc2 = 0; acc3 = 0; for (i = 0; i < T; i++) { acc0 = L_mac(acc0, x[i], c[j+0+i]); acc1 = L_mac(acc1, x[i], c[j+1+i]); acc2 = L_mac(acc2, x[i], c[j+2+i]); acc3 = L_mac(acc3, x[i], c[j+3+i]); } res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } for (j = 0; j < N; j += 4) { acc0 = 0;acc1 = 0;acc2 = 0;acc3 = 0; for (i = 0; i < T; i += 4) { acc0 = L_mac(acc0, x[i+0], c[j+0+i]); acc1 = L_mac(acc1, x[i+0], c[j+1+i]); acc2 = L_mac(acc2, x[i+0], c[j+2+i]); acc3 = L_mac(acc3, x[i+0], c[j+3+i]); acc0 = L_mac(acc0, x[i+1], c[j+1+i]); acc1 = L_mac(acc1, x[i+1], c[j+2+i]); acc2 = L_mac(acc2, x[i+1], c[j+3+i]); acc3 = L_mac(acc3, x[i+1], c[j+4+i]); /* third loop body for x[i+2] */ /* fourth loop body for x[i+3] */ } res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } 4 5 Inner loop unrolling
Multisample Example - Step 5 Explicit scalarization for (j = 0; j < N; j += 4) { acc0 = 0;acc1 = 0;acc2 = 0;acc3 = 0; for (i = 0; i < T; i += 4) { acc0 = L_mac(acc0, x[i+0], c[j+0+i]); acc1 = L_mac(acc1, x[i+0], c[j+1+i]); acc2 = L_mac(acc2, x[i+0], c[j+2+i]); acc3 = L_mac(acc3, x[i+0], c[j+3+i]); acc0 = L_mac(acc0, x[i+1], c[j+1+i]); acc1 = L_mac(acc1, x[i+1], c[j+2+i]); acc2 = L_mac(acc2, x[i+1], c[j+3+i]); acc3 = L_mac(acc3, x[i+1], c[j+4+i]); /* third loop body for x[i+2] */ /* fourth loop body for x[i+3] */ } res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } 5 for (j = 0; j < N; j += 4) { acc0=acc1=acc2=acc3=0; xx = x[i+0]; c0 = c[j+0]; c1 = c[j+1]; c2 = c[j+2]; c3 = c[j+3]; for (i = 0; i < T; i += 4) { acc0 = L_mac(acc0, xx, c0); acc1 = L_mac(acc1, xx, c1); acc2 = L_mac(acc2, xx, c2); acc3 = L_mac(acc3, xx, c3); xx = x[i+1]; c0 = c[j+4+i]; acc0 = L_mac(acc0, xx, c1); acc1 = L_mac(acc1, xx, c2); acc2 = L_mac(acc2, xx, c3); acc3 = L_mac(acc3, xx, c0); xx = x[i+2]; c0 = c[j+5+i]; /* similar third and fourth loop */ } res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } 6
Multisample Example - Final Result for (j = 0; j < N; j += 4) { acc0=acc1=acc2=acc3=0; xx = x[i+0]; c0 = c[j+0]; c1 = c[j+1]; c2 = c[j+2]; c3 = c[j+3]; for (i = 0; i < T; i += 4) { acc0 = L_mac(acc0, xx, c0); acc1 = L_mac(acc1, xx, c1); acc2 = L_mac(acc2, xx, c2); acc3 = L_mac(acc3, xx, c3); xx = x[i+1]; c0 = c[j+4+i]; acc0 = L_mac(acc0, xx, c1); acc1 = L_mac(acc1, xx, c2); acc2 = L_mac(acc2, xx, c3); acc3 = L_mac(acc3, xx, c0); xx = x[i+2]; c0 = c[j+5+i]; /* similar third and fourth loop */ } res[j+0] = acc0; res[j+1] = acc1; res[j+2] = acc2; res[j+3] = acc3; } one cycle (4 macs + 2 moves) one cycle (4 macs + 2 moves)
Search Techniques Adapted for StarCore SC140 • finding for maximum • finding the maximum and its position • finding the maximum ratio • finding the position of the maximum ratio
Maximum search #include <prototype.h> Word16 max_search(Word16 vector[], unsigned short int length ) { #pragma align *vector 8 signed short int i = 0; Word16 max0, max1, max2, max3; max0 = vector[i+0]; max1 = vector[i+1]; max2 = vector[i+2]; max3 = vector[i+3]; for(i=4; i<length; i+=4) { max0 = max(max0, vector[i+0]); max1 = max(max1, vector[i+1]); max2 = max(max2, vector[i+2]); max3 = max(max3, vector[i+3]); } max0 = max(max0, max1); max1 = max(max2, max3); return max(max0, max1); } • reduction operation => split maximum
Maximum search - Comments • presented solution works for both 16-bit and 32-bit values • better solution for 16-bit (asm only) • based on max2 instruction (SIMD style) • fetches two 16-bit values as a 32-bit one • eight maxima per cycle
Maximum Search – ASM with max2 move.2l (r0)+n0,d4:d5 move.2l (r1)+n0,d6:d7 move.2l (r0)+n0,d0:d1 move.2l (r1)+n0,d2:d3 FALIGN LOOPSTART3 [ max2 d0,d4 max2 d1,d5 max2 d2,d6 max2 d3,d7 move.2l (r0)+n0,d0:d1 move.2l (r1)+n0,d2:d3 ] LOOPEND3 [ max2 d0,d4 max2 d1,d5 max2 d2,d6 max2 d3,d7 ]
Maximum position • based on comparisons • around N cycles • in C, two maxima required • based on maximum search • around N/2 cycles • based on max2-based maximum search • around N/4 cycles • care must be taken to preserve the original semantics