Download
1 / 12
140 likes | 358 Views
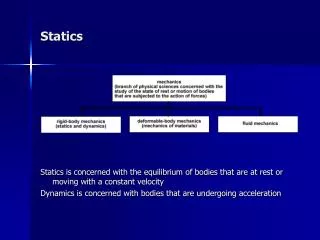
Statics. Chapter 4 Analysis of Structure. Introduction. Structure – connected system of members designed to support loads safely or to transfer forces effectively Analysis of structures involves analyzing the equilibrium of the entire structure, part of the structure, or an individual member

E N D
Statics Chapter 4 Analysis of Structure
Introduction • Structure – connected system of members designed to support loads safely or to transfer forces effectively • Analysis of structures involves analyzing the equilibrium of the entire structure, part of the structure, or an individual member • In these types of problems determine the external reactions as well as the internal forces in the member • Internal forces are the forces within the members responsible for holding the structure together
External and Internal Forces in a Structure • External forces – include the weight the externally applied forces on the structure and the reactions from the supports. These forces are responsible for the equilibrium of the entire structure • Internal Forces – are the forces inside the structural members and are responsible for holding the structure together. • Limitation of the principle of transmissibility • When dealing with external forces on a structure the structure can be considered as a rigid body • So principle of transmissibility can be applied • When concern is the internal forces or the deformation of a structure – principle of transmissibility is not applicable
Trusses • Are frameworks composed of slender members joined together at the ends of the members • When a member of a truss lie essentially in a single plane the truss is a plane truss • Bridge trusses are usually plane trusses • Connected together with lateral bracing • Floor system provides the means for transmitting the load
Trusses • Two assumptions are used for truss analysis • All loadings are applied at the joints • The members are joined together by smooth pins • Based on these assumptions each truss member is a two force member • Entire truss can be considered an assembly of two force members connected at their ends by frictionless pins • Truss member is subjected to axial forces only – in tension or compression
Trusses • Simple truss – must be rigid – used to indicate that the truss will be able to maintain its initial shape and will not collapse under ordinary loading conditions • Statical determinacy • General method for determining the statically determinacy of a truss is by comparing the total number of independent equations available to the total number of unknowns • J be the number of joints • M the number of members • R the number of reaction components • 2j=m+r
Method of joints • Truss analysis • Determining the internal axial force in each member of a truss • Necessary prerequisite to the design to know the force of truss members so sizes and connections can be designed property • Method of Joints • Each joint is isolated from the rest of the truss and equilibrium conditions of each joint are considered • Truss members are all two force bodies subjected to axial forces only • Sum Fx =0 • Sum Fy=0 • Free body diagrams – can be drawn for each joint and each member • Arrow Sign Convention – tension member is represented by arrows on each end of the member pointing away from the connected joints – compression member arrows point towards the joint • Sometimes difficult to tell, a position result indicates made right choice negative means the member is the opposite.
Method of Joints • Example 4-1 • Example 4-2
Zero Force member • Under certain loading conditions some truss members carry no loads – called zero force members • If joint is not subjected to any load or support reaction then the equilibrium condition along the x direction requires that force to be zero • If a joint has two non collinear members and not subjected to any load or support reaction • Rules • If a non loaded truss joint is formed by three members two of which are collinear the third member must be a zero force member • If a non loaded truss joint is formed by two non collinear members then both of them must be zero force members • Example 4-3
Method of Sections • Consists of passing a section through the members in question • Sicne there are three independent equations available we can solve up to three unknowns • The main advantage of the method of sections is that the force in a member can be determined directly by passing a section through the member • When a member has been cut its internal forces are exposed and they become external forces so they must be shown on the free body diagram • Figure 4-10 page 159 and equations • Example 4-4 • Example 4-5 • Example 4-6
Frames • Pin connected frames are structures containing one or more multiforce members - a multiforce member is acted upon by three or more forces that are not all in the axial direction of the member • Analysis of a frame • External reactions at the supports of most frames can be determined by considering the free body diagram of the entire frame • Identify all the two force members in the frame – two force member may or may not be straight – two forces in a two force member are queal and opposite and directed along the line joining the two points of application • Force at a pin connected joint between two multi force members represented by the horizontal and vertical components • Newton's law of action and reaction must be observed when forces are drawn • Generally three equilibrium equations can be written for the free body diagram • Direction of the unknown force components can be assumed arbitrarily as long as the law of action and reaction is observed • Sometimes not all the reaction components or joint forces can be solved from the free body diagram • Example 4-7 • Example 4-8
Machines • Are structures that consist of ne or more movable parts and at least ne of the members or part of the machine is a multiforce member • Analysis of machines • Similar to that of a frame except a machine may not be fully constrained because of the moveable parts. • Analysis usually involves the equilibrium of part of the machine or a member isolated from the other part of the machine • Example 4-9 • Example 4-10