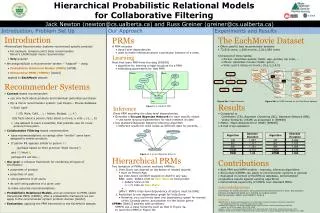
Download
1 / 51
510 likes | 646 Views
Probabilistic Models of Object-Relational Domains. Daphne Koller Stanford University Joint work with:. Lise Getoor. Ben Taskar. Drago Anguelov. Pieter Abbeel. Rahul Biswas. Nir Friedman. Ming-Fai Wong. Evan Parker. Avi Pfeffer. Eran Segal. Intell_Jane. Diffic_CS101. Intell_George.

E N D
Probabilistic Models of Object-Relational Domains Daphne Koller Stanford University Joint work with: Lise Getoor Ben Taskar Drago Anguelov Pieter Abbeel Rahul Biswas Nir Friedman Ming-Fai Wong Evan Parker Avi Pfeffer Eran Segal
Intell_Jane Diffic_CS101 Intell_George Diffic_CS101 Grade_Jane_CS101 Grade_George_CS101 Intell_George Diffic_Geo101 Grade_George_Geo101 Bayesian Networks: Problem • Bayesian nets use propositional representation • Real world has objects, related to each other Intelligence Difficulty These “instances” are not independent A C Grade
Probabilistic Relational Models • Combine advantages of relational logic & BNs: • Natural domain modeling: objects, properties, relations • Generalization over a variety of situations • Compact, natural probability models • Integrate uncertainty with relational model: • Properties of domain entities can depend on properties of related entities • Uncertainty over relational structure of domain
Teaching-ability Teaching-ability Intelligence Welcome to Geo101 Difficulty Welcome to CS101 Intelligence Difficulty St. Nordaf University Prof. Jones Prof. Smith Teaches Teaches Grade In-course Registered Satisfac George Grade Registered Satisfac In-course Grade Registered Jane Satisfac In-course
Registration Grade Satisfaction Relational Schema • Specifies types of objects in domain, attributes of each type of object & types of relations between objects Classes Student Professor Intelligence Teaching-Ability Teach Take Attributes Relations In Course Difficulty
Representing the Distribution • Very large probability space for a given context • All possible assignments of all attributes of all objects • Infinitely many potential contexts • Each associated with a very different set of worlds Need to represent infinite set of complex distributions
Professor Teaching-Ability Student Intelligence Course Difficulty A B C Reg Grade Satisfaction Probabilistic Relational Models • Universals: Probabilistic patterns hold for all objects in class • Locality: Represent direct probabilistic dependencies • Links define potential interactions [K. & Pfeffer; Poole; Ngo & Haddawy]
Teaching-ability Teaching-ability Grade Intelligence Satisfac Welcome to Geo101 Grade Difficulty Satisfac Welcome to CS101 Intelligence Grade Difficulty Satisfac PRM Semantics • Instantiated PRM BN • variables: attributes of all objects • dependencies: determined by links & PRM Prof. Jones Prof. Smith George Jane
C Welcome to Geo101 Welcome to A low high CS101 The Web of Influence easy / hard low / high
Reasoning with a PRM • Generic approach: • Instantiate PRM to produce ground BN • Use standard BN inference • In most cases, resulting BN is too densely connected to allow exact inference • Use approximate inference: belief propagation • Improvement: Use domain structure — objects & relations — to guide computation • Kikuchi approximation where clusters = objects
Reg Course Student Data Model Objects Database Learner Probabilistic Model Expert knowledge • What are the objects in the new situation? • How are they related to each other? Prob. Inference Data for New Situation
Two Recent Instantiations • From a relational dataset with objects & links, classify objects and predict relationships: • Target application: Recognize terrorist networks • Actual application: From webpages to database • From raw sensor data to categorized objects • Laser data acquired by robot • Extract objects, with their static & dynamic properties • Discover classes of similar objects
Summary • PRMs inherit key advantages of probabilistic graphical models: • Coherent probabilistic semantics • Exploit structure of local interactions • Relational models inherently more expressive • “Web of influence”: use multiple sources of information to reach conclusions • Exploit both relational information and power of probabilistic reasoning
Discriminative Probabilistic Models for Relational Data Ben Taskar Stanford University Joint work with: Pieter Abbeel Daphne Koller Ming-Fai Wong
Tom Mitchell Professor Project-of WebKB Project Advisor-of Member Sean Slattery Student Web KB [Craven et al.]
Student Reg Template potential Intelligence Grade Course Study Group Difficulty Reg2 Student2 Grade Intelligence Undirected PRMs: Relational Markov Nets • Universals: Probabilistic patterns hold for all groups of objects • Locality: Represent local probabilistic dependencies • Address limitations of directed models: • Increase expressive power by removing acyclicity constraint • Improve predictive performance through discriminative training [Taskar, Abbeel, Koller ‘02]
Grade Intelligence Welcome to Difficulty Geo101 Grade Intelligence Grade Difficulty Intelligence Grade RMN Semantics Instantiated RMN MN • variables: attributes of all objects • dependencies: determined by links & RMN Geo Study Group George Welcome to CS101 CS Study Group Jane Jill
(Reg1.Grade,Reg2.Grade) Grade Grade Intelligence Intelligence Grade Grade Intelligence Intelligence Grade Grade Intelligence Intelligence Grade Grade Learning RMNs • Parameter estimation is not closed form • Convex problem unique global maximum Maximize L = log P(Grades,Intelligence|Difficulty) easy / hard ABC low / high Grade Difficulty Intelligence Grade Intelligence Grade Difficulty Intelligence Grade
Web Classification Experiments • WebKB dataset • Four CS department websites • Five categories (faculty,student,project,course,other) • Bag of words on each page • Links between pages • Anchor text for links • Experimental setup • Trained on three universities • Tested on fourth • Repeated for all four combinations
To- Page Category ... WordN Word1 Link Exploiting Links From- Page Category ... Classify all pages collectively, maximizing the joint label probability WordN Word1 35.4% relative reduction in error relative to strong flat approach
Scalability • WebKB data set size • 1300 entities • 180K attributes • 5800 links • Network size / school: • 40,000 variables • 44,000 edges • Training time: 20 minutes • Classification time: 15-20 seconds
Member Advisor-of Member Predicting Relationships Tom Mitchell Professor WebKB Project • Even more interesting are relationships between objects Sean Slattery Student
WebKB++ • Four new department web sites: • Berkeley, CMU, MIT, Stanford • Labeled page type (8 types): • faculty, student, research scientist, staff, research group, research project, course, organization • Labeled hyperlinks and virtual links (6 types): • advisor, instructor, TA, member, project-of, NONE • Data set size: • 11K pages • 110K links • 2million words
Flat Model To- Page From- Page ... ... Word1 WordN Word1 WordN Type Rel NONE advisor instructor TA member project-of ... LinkWordN LinkWord1
... ... ... ... ... ... Flat Model
Collective Classification: Links To- Page From- Page Category Category ... ... Word1 WordN Word1 WordN Type Rel ... LinkWordN LinkWord1
... ... ... ... ... ... Link Model
Triad Model Advisor Professor Student Member Member Group
Triad Model Advisor Professor Student TA Instructor Course
Error measured over links predicted to be present Link presence cutoff is at precision/recall break-even point (30% for all models) ... ... ... Link Prediction: Results 72.9% relative reduction in error relative to strong flat approach
Summary • Use relational models to recognize entities & relations directly from raw data • Collective classification: • Classifies multiple entities simultaneously • Exploits links & correlations between related entities • Uses web of influence reasoning to reach strong conclusions from weak evidence • Undirected PRMs allow high-accuracy discriminative training & rich graphical patterns
Learning Object Maps from Laser Range Data Dragomir Anguelov Daphne Koller Evan Parker Robotics Lab Stanford University
Occupancy Grid Maps • Static world assumption • Inadequate for answering symbolic queries person robot
Objects • Entities with coherent properties: • Shape • Color • Kinematics (Motion)
Object Maps • Natural and concise representation • Exploit prior knowledge about object models • Walls are straight, doors open and close • Learn global properties of the environment • Primary orientation of walls, typical door width • Generalize properties across objects • Objects viewed as instances of object classes, parameter sharing
Learning Object Maps • Define a probabilistic generative model • Suggest object hypotheses • Optimize the object parameters (EM) • Select highest-scoring model Object Properties Object Segmentation
Probabilistic Model • Data: A set of scans • Scan: set of <robot position, laser beam reading> tuples • Each scan is associated with a static map M t • Global Map M • A set of objects {1, …, J} • Each object i = {S[i], Dt[i]} • S[i] – static parameters • Dt[i] – dynamic parameters • Non-static environment – dynamic parameters vary only between static maps • Fully dynamic environment – dynamic parameters vary between scans
Probabilistic Model - II • General map M • Static maps M1… MT • Objects i • Robot positions sit • Laser beams zit • Correspondence variables Cit
Generative Model Specification • Sensor model • Object models • Particular instantiation: • Walls • Doors • Model score
Modeling occlusion: Reading ztk generated from: Random model (uniform probability) First object the beam intersects Actual object (Gaussian probability) MaxRange model (Delta function) Why we should model occlusion: Realistic sensor model Helps to infer motion Improved model search Sensor Model
Wall Object Model • Wall model i • A line defined by <i, i>, as in • S intervals <1, 2> each denoting a segment along the line • 2S + 2 independent parameters • Collinear segments bias
Door Object Model • Door Model i • A pivot p • Width w • A set of angles t (t=1,2,…) • Limited rotation (90o) • Arc “center” d • 4 static + 1 dynamic parameter
increased data likelihood Model Score • Define structure prior p(M) over possible maps: • |S[M]| — number of static parameters in M • |D[M]| — number of dynamic parameters in M • L[M] —total length of segments in M Increased number of parameters • Maximize log-posterior probability of map M, data Z:
Learning Model Parameters (EM) • E-step • Compute expectations • M-step • Walls • Optimize line parameters • Optimize segment ends • Doors • Optimize pivot and angles • Optimize door width
Suggesting Object Hypotheses • Wall hypotheses • Use Hough transform (histogram-based approach) • Compute preferred direction of the environment • Use both to suggest lines • Door hypotheses • Use temporal differencing of static maps • Check if points along segments in static maps Mt are well explained in the general map M • If not, the segment is a potential door
Future Work • Simultaneous localization & mapping • Object class hierarchies • Dynamic environments • Enrich the object representation: • More sophisticated shape models • Color • 3D