Download
1 / 30
300 likes | 445 Views
The IDE/ATA Interface. How can our mini-Operating System, executing in protected mode, access the hard disk?. The EDD services.

E N D
The IDE/ATA Interface How can our mini-Operating System, executing in protected mode, access the hard disk?
The EDD services • So far we have relied upon the Extended Disk Drive service-functions (available in real-mode via ‘int $0x13’) to perform any transfers of data between main memory and our computer system’s hard disk • But these service-functions in ROM-BIOS are designed to be executed in real-mode • Can we achieve their effects when PE=1?
Persistent data storage • Any operating system we might design, no matter how minimal, would need to offer a way to write and to read ‘persistent data’, organized into some kind of ‘file system’ that is maintained on a secondary storage device, such as a hard disk or a diskette
Hardware interfacing • Modern computer platforms are expected to provide a specially designed peripheral processor, the hard disk controller, which can be programmed by system software to carry out data-transfers between a disk and the computer’s primary memory • The programming interface for hard disk controllers continues to evolve, but a stable set of standard capabilities exists
A few cautions • Our classroom and laboratory computers are shared by many users who are taking various computer sciences courses • Writing to the hard disk in a careless way can do damage to the operating systems (making a machine completely unusable) • In your early experiments you will need to use great caution to avoid corrupting vital areas of these shared hard disks!
Fixed-Size ‘blocks’ • All data-transfers to and from the hard disk are comprised of fixed-size blocks called ‘sectors’ (whose size equals 512 bytes) • On modern hard disks, these sectors are identified by sector-numbers starting at 0 • This scheme for addressing disk sectors is known as Logical Block Addressing (LBA) • So the hard disk is just an array of sectors
Platform-specific parameters • Although older PCs used some standard I/O port-addresses for communicating with their Disk Controllers, newer PCs like ours allow these port-addresses to be assigned dynamically during the system’s startup • To keep our demonstration-code as short and uncluttered as possible, we will ‘hard-code’ the port-numbers our machines use
The ATA/IDE Interface • All communication between our driver and the Hard Disk Controller is performed with ‘in’ and ‘out’ instructions that refer to ports • Older PCs had standard i/o port-numbers for communicating with the Disk Controller • But newer PCs assign these dynamically
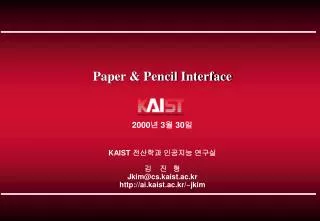
When reading… Data Error Sector Count LBA Low LBA Mid LBA High Device Status When writing… Data Features Sector Count LBA Low LBA Mid LBA High Device Command Command Block registers
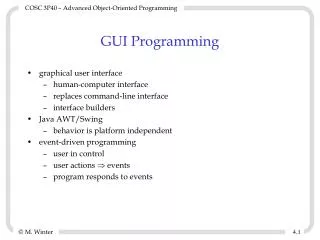
When reading… Alternate Status When writing… Device Control Control Block Registers INCRITS InterNational Committee on Information Technology Standards Committee T-13
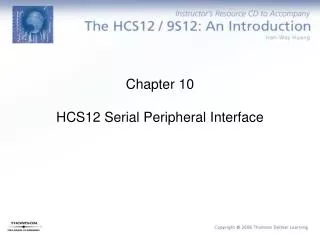
When reading… Primary DMA Control Primary DMA Status Primary PRD Pointer When writing… Primary DMA Control Primary DMA Status Primary PRD Pointer Bus Master DMA INTEL ICH6 I/O Controller Hub Datasheet SATA Controller Registers
Two I/O design-paradigms • PIO: Programmed I/O for ‘reading’ • The cpu outputs parameters to the controller • The cpu waits till the data becomes available • The cpu transfers the data into main memory • DMA: Direct Memory Access for ‘reading’ • The cpu outputs parameters to the controller • The cpu activates the DMA engine to begin • The cpu deactivates the DMA engine to end
PIO algorithm overview • First select the device to read from: • Wait until the controller is not busy and does not have any data that it wants to transfer • Write to Command Block’s Device register to select the disk to send the command to • Wait until the controller indicates that it is ready to receive your new command
PIO overview (continued) • Place the command’s parameters into the appropriate Command Block registers • Put command-code in Command register • Then wait until the controller indicates that it has read the requested sector’s data and is ready for you to transfer it into memory • Use a loop to input 256 words (one sector) from the Command Block’s Data register
PIO overview (conclusion) • After you have transferred a sector, check the Controller Status to see if there were any errors (if so read the Error register) • To implement this algorithm, we need to look at the meaning of some individual bits in the Status register (and Error register)
Status register (cmd+7) 7 6 5 4 3 2 1 0 BSY DRDY DF DRQ ERR Legend: BSY (Device still Busy with prior command): 1=yes, 0=no DRDY (Device is Ready for a new command): 1=yes, 0=no DF (Device Fault – command cannot finish): 1=yes, 0=no DRQ (Data-transfer is currently Requested): 1=yes, 0=no ERR (Error information is in Error Register): 1 = yes, 0=no
Device register (cmd+6) 7 6 5 4 3 2 1 0 1 LBA (=1) 1 DEV (0/1) Sector-ID[ 27..24 ] Legend: LBA (Logical Block Addressing): 1=yes, 0=no DEV (Device selection): 1=slave, 0=master Sector-ID: Most significant 4-bits of 28-bit Sector-Address
Error register (cmd+1) 7 6 5 4 3 2 1 0 UNC MC IDNF MCR ABRT NM Legend: UNC (Data error was UnCorrectable): 1=yes, 0=no MC (Media was Changed): 1=yes, 0=no IDNF (ID Not Found): 1=yes, 0=no MCR (Media Change was Requested): 1=yes, 0=no ABRT (Command was Aborted): 1 = yes, 0=no NM (No Media was present): 1=yes, 0=no
Device Control register (ctl+2) 7 6 5 4 3 2 1 0 HOB 0 0 0 0 SRST nIEN 0 Legend: HOB (High-Order Byte): 1=yes, 0=no SRST (Software Reset requested): 1=yes, 0=no nIEN (negate Interrupt Enabled): 1=yes, 0=no NOTE: The HOB-bit is unimplemented on our machines; it is for large-capacity disks that require 44-bit sector-addresses
PIO demo: ‘ideload1.s’ • We have created a substitute boot-loader which implements the same functionality as our previous ‘quickload.s’ program • Its purpose is two-fold: • It shows how to read 16 disk sectors with PIO • It could easily be rewritten to be executed in protected-mode by an operating system
Advantage of DMA • For a multiprogramming operating system that employs ‘timesharing’ to concurrently execute multiple tasks, there is an obvious advantage in ‘offloading’ the data-transfer step to a peripheral processor • It frees the CPU to do work on other tasks during the time-interval when the data is actually being transferred
DMA Command register 7 6 5 4 3 2 1 0 0 0 0 0 Read/ Write 0 0 Start /Stop Legend: Start/Stop: 1 = Start DMA transfer; 0 = Stop DMA transfer Read/Write: 1 = Read to memory; 0 = Write from memory
DMA Status register 7 6 5 4 3 2 1 0 PRDIS - - 0 0 INT ERR ACT Legend: ACT (DMA engine is currectly Active): 1 = yes; 0 = no ERR (The controller encountered an Error): 1=yes; 0=no INT (The controller generated an Interrupt: 1=yes; 0=no PRDIS: (PRD Interrupt Status): 1=active, 0=inactive Software clears these labeled bits by writing 1’s to them
PRD Pointer register 31 0 Physical memory-address of the PRD Table (must be quadword aligned) Each PRD (Physical Region Descriptor) consists of these three fields: Base-address of the physical region bytes 3..0 Reserved (0) E O T Size of the region bytes 7..4 NOTE: The total size of the PRD Table cannot exceed 64KB
DMA algorithm overview • First select the device to read from: • Wait until the controller is not busy and does not have any data that it wants to transfer • Write to Command Block’s Device register to select the disk to send the command to • Wait until the controller indicates that it is ready to receive your new command • NOTE: This step is the same as for PIO
DMA overview (continued) • Engage the DMA engine for writing to memory by outputting 0x08 to the DMA Command Port • Clear the labeled bits in the DMA Status register • Place the command’s parameters into the appropriate IDE Command Block registers • Put command-code in IDE Command register • Activate the DMA data-transfer by outputting 0x09 to the DMA Command register • Then wait until the DMA Status register indicates that the DMA data-transfer has been completed
DMA algorithm (concluded) • Turn off the DMA engine by writing 0x08 to the DMA Command register (to clear ACT) • Clear the labeled bits in the DMA Status register (by writing ‘1’s to those bits) • Read the IDE Status register (to clear any interrupt from the IDE Controller), and if bit 0 is set (indicating some error-information is available), then read IDE Error register
DMA demo: ‘ideload2.s’ • We also created a substitute boot-loader which implements the same functionality as our previous ‘quickload.s’ program, but uses DMA instead of PIO • Its purpose is two-fold: • It shows how to read 16 disk sectors via DMA • It could easily be rewritten to be executed in protected-mode by an operating system
In-class exercise • Choose one of these demo-programs and use the ideas it contains to perform a disk read operation while in protected-mode • For example, write a program that reads the hard disk’s Master Boot Record (i.e., sector 0) and display its Partition Table