Download
1 / 1
10 likes | 135 Views
Master UKF. Measurement Update. Time Update. State. Measurement. Innovation. Slave UKF. Measurement Update. Time Update. Noise Covariance. Noise Covariance Identification-Based Adaptive UKF with Application to Mobile Robot System.

E N D
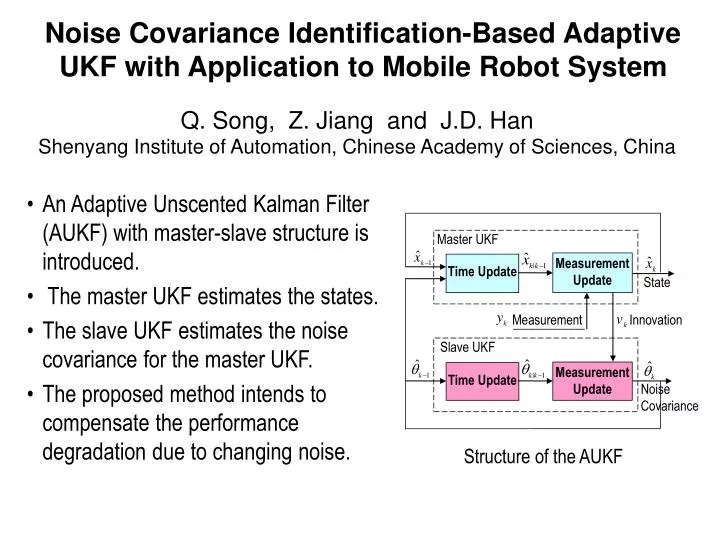
Master UKF Measurement Update Time Update State Measurement Innovation Slave UKF Measurement Update Time Update Noise Covariance Noise Covariance Identification-Based Adaptive UKF with Application to Mobile Robot System Q. Song, Z. Jiang and J.D. HanShenyang Institute of Automation, Chinese Academy of Sciences, China • An Adaptive Unscented Kalman Filter (AUKF) with master-slave structure is introduced. • The master UKF estimates the states. • The slave UKF estimates the noise covariance for the master UKF. • The proposed method intends to compensate the performance degradation due to changing noise. Structure of the AUKF