Download
1 / 18
180 likes | 283 Views
DISTRIBUTED EMBEDDED SYSTEMS « Metrotinette » DUPONT Vincent RAMOND Amélie SALVY Julien TASAYCO Victor VAUDANO Carole. I. Project presentation II. Network section III. Control section IV. Real Time section V. Results VI. Conclusion. CONTENTS.

E N D
DISTRIBUTED EMBEDDED SYSTEMS « Metrotinette » DUPONT Vincent RAMOND Amélie SALVY Julien TASAYCO Victor VAUDANO Carole
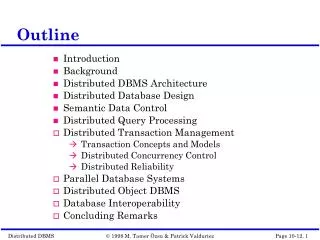
I. Project presentation II. Network section III. Control section IV. Real Time section V. Results VI. Conclusion CONTENTS
Three similar locomotives controlled without any physical link Three main aspects to consider Objectives: Constant distance between successive locomotives → No shock allowed Data sending management Project Presentation
Project's given components : A CAN bus used for communication A Cortex M3 for each locomotive OSEK OS implemented in each microchip Project Presentation
Project Presentation Platform architecture
1. System model Train motor model A first-order linear system State vector ( ∫position ; position ; speed ) Inputs (Command ; Disturbs) Output (Position) Control section
Control section 2. Single train control
No speed sensor implementation → State feedback based on position (speed obtained with derivation) PID implemented from a LQR control Control section
3. Central control Control section
Control section Speed and position feedback Speed command based on speed and position errors → PI feedback
Choice of a cheap implementation Stays safe anyways Conclusion