Download
1 / 12
130 likes | 535 Views
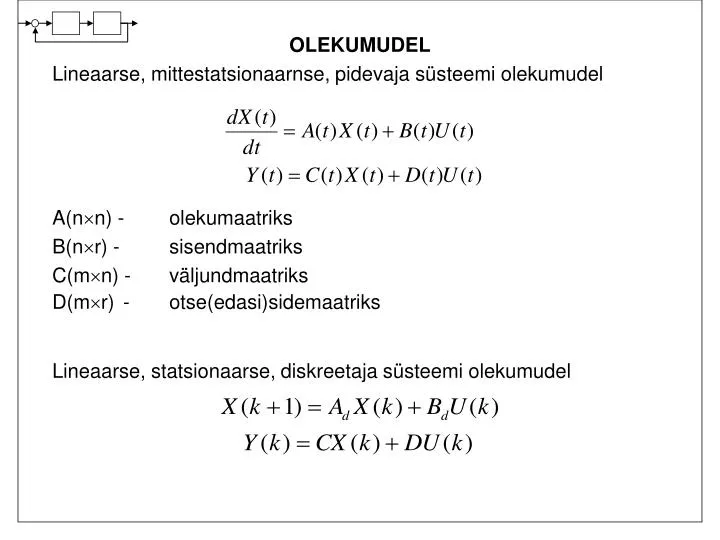
OLEKUMUDEL Lineaarse, mittestatsionaarnse, pidevaja süsteemi olekumudel A(n n) - olekumaatriks B(n r) - sisendmaatriks C(m n) - väljundmaatriks D(m r) - otse(edasi)sidemaatriks Lineaarse, statsionaarse, diskreetaja süsteemi olekumudel. Olekumudeli näide 1 Antenni mudel.

E N D
OLEKUMUDEL Lineaarse, mittestatsionaarnse, pidevaja süsteemi olekumudel A(nn) - olekumaatriks B(nr) - sisendmaatriks C(mn) - väljundmaatriks D(mr)- otse(edasi)sidemaatriks Lineaarse, statsionaarse, diskreetaja süsteemi olekumudel
Olekumudeli näide 1Antenni mudel Antenni keerab mootor (juhtsignaal sisendpinge V), nurga anduri järgi saab leida ka nurga muutumise kiirusrad/s. - antenni nurk rad, - antenni nurga muutumise kiirus, J - kõikide keerlevate osade inertsmoment kg m2, Bs - igasuguste sumbumiste summaarne koefitsient kg m2/s] M - mootori poolt arendatav moment kg m2/s2, M = k·U(t), U(t) - mootori sisendpinge V, Pöördliikumist kirjeldav pöördemomentide tasakaaluvõrrand (diferentsiaalvõrrandina): Sellest võrrandist saab tuletada olekumudeli valides X1-ks ja X2-ks
Antenni mudeli kirjeldus olekumudelina Üldkujul maatriksesituses: Valides olekumudelis X1-ks ja X2-ks , saame: B A J=10, Bs=46, k=7.78
Olekumudeli näide 2Õhupalli mudel 0+ Olekuvõrrandid: U0+u v H0+h
Olekuvõrrandi karakteristlik polünoom det(sE-A); Karakteristliku võrrandi det(sE-A)=0juured on A omaväärused. Ülekandemaatriks
Diskreetaja süsteemid Olgu meil antud pidevaja olekumudel kus A – nxn; B – nxr; C – mxn. tk-1 tk tk+1 u(tk) u(t) y(t) y(tk) D/A Süsteem A/D Kell
Meil on olemas olekumudel Soovime leida sisend-väljund mudeli. Võtame kasutusele operaatori z
H(z) – ülekandemaatriks – m x r. Eeldame, et m=r=1 → ühemõõtmeline süsteem. ülekandefunktsioon diferentsvõrrand. Kui u(k), siis y(k) on leitav
Näide h! kus Siis
u(k)=1, k≥0 Süsteemi järk on 2.
y(k) 8 6 4 2 k 1 2 3 4 z-teisendus jada 1952 – 1958 Jury Barker Tsõpkin kujutis originaal