Download
1 / 28
280 likes | 440 Views
Delay Analysis and Optimality of Scheduling Policies for Multihop Wireless Networks. Gagan Raj Gupta Post-Doctoral Research Associate with the Parallel Programming Laboratory, University of Illinois at Urbana–Champaign.

E N D
Delay Analysis and Optimality of Scheduling Policies for Multihop Wireless Networks Gagan Raj Gupta Post-Doctoral Research Associate with the Parallel Programming Laboratory, University of Illinois at Urbana–Champaign. Ness B. ShroffOhio Eminent Scholar in Networking and Communications Chaired Professor of ECE and CSE, Ohio State University Published in IEEE/ACM Transactions on Networking, Feb. 2011
Outline • Introduction • System model • Deriving lower bounds on average delay • Design of delay-efficient policies • Illustrative examples • Conclusion
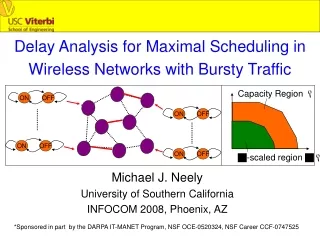
Introduction • A large number of studies on multihop wireless networks have been devoted to system stability while maximizing metrics like throughput or utility. • The delay performance of wireless networks, however, has largely been an open problem. • the mutual interference inherent in wireless networks. • This paper presented a new, systematic methodology to obtain a fundamental lower bound on the average packet delayunder any scheduling policy.
Introduction (cont’d) • The delay performance of any scheduling policy is primarily limited by the interference. • Many bottlenecks to be formed in the network • The transmission medium is shared • A bottleneck contains multiple links
Introduction (cont’d) • In this paper, the authors development of a new queue grouping techniqueto handle the complex correlations of the service process resulting from the multihop nature of the flows • (K,X)-bottlenecks • Queueing model
System model • The service structure is slotted. Each packet has a deterministic service time equal to one unit. • A(t)=(A1(t),…,AN(t)) : the vector of exogenous arrivals • Ai(t) : the number of packets injected into the system by the source si during time slot t. • =(1,…,N) : the corresponding arrival rate vector. • Pi=(vi0,vi1,…,vi|Pi|) : the path on which flow i is routed • vij is a node at a j-hop distance from the source node
System model (cont’d) • The queue length vector is denoted byQ(t) = (Qij(t): i=1,2,…N) • At each time slot, an activation vectorI(t) is scheduled depending on the scheduling policy and the underlying interference model. • Iij(t) indicates whether or not flow i received service at the j-thhop from source si at time slot t.
(K,X)-bottleneck • We partition the flows into several groups. • Each group passes through a (K,X)-bottleneck, and the queueing for each group is analyzed individually. • (K,X)-bottleneck : a set of links X such that no more than Kof its links can be scheduled simultaneously • (K,X)-bottleneck G/D/K queue
Characterizing Bottlenecks in the System • 1{iX}: indicate whether the flow passes through the (K,X)-bottleneck. • The total flow rate X crossing the bottleneck X is given by • Let the flow I enter the (K,X)-bottleneck at the node viki and leave it at the node vili . number of hops in bottleneck
Deriving lower bounds on average delay • The sum of queues upstream of each link in X at time t is given by SX(t) packet bottleneck packet Si1=1 Si3=1 Si2=1 SX=6 Si4=2 Si6=2 Si5=2 SX=5 Si4=1 Si6=2 Si5=2
Reduced System • Let be the queue length of this system at time t. The queue evolution of the reduced system is given by the following equation:
Bound on Expected Delay delay from vilito vi|Pi| delay from vi1to vili where
Flow Partition • How to compute the lower bound on the average delay for a system containing multiple bottlenecks ?
Flow Partition (cont’d) • Assume that we have precomputed a list of bottlenecks in the system • Let Z be the set of flows in the system. • Let π be a partition on Z such that each element p π is a set of flows passing through a common (Kp, Xp)-bottleneck. • Our objective is to compute a partition π such that the lower bound on can be maximized.
Flow Partition (cont’d) • Greedily search for a set of flows pPand the corresponding (Kp,Xp)-bottleneck that yields the maximum lower bound
Design of delay-efficient policies • Such a scheduler must satisfy the following properties: • Ensure high throughput • Allocate resources equitably • Starvation leads to an increase in the average delay in the system. K
The clique network • A clique network is one in which the interference constraints allow only one link to be scheduledat any given time. • (1,X)-bottleneck • Any work-conserving policy will achieve the lower bound on SX. • Note that a policy that minimizes SX may not minimize the sum of queue lengths in the system at all times, nor is it guaranteed to be delay-optimal.
The clique network (cont’d) • The optimal policy • Last Buffer First Serve (LBFS) • Scheduling the packet that is closest to its destination is optimal. 1-hop to dest. Delay time: 1, 3, 6 2-hop to dest. 3-hop to dest. Delay time: 3, 5, 6
Back-Pressure Policy • A throughput-optimal scheduling policy. • Define the differential backlog of flow i passing through a link as • For each link, the flow with the maximum differential backlog is chosen. • The link-scheduling component schedules the activation vector with the maximum weight at every time slot.
Illustrative examples • Tandem Queue The differential backlog at the last hop becomes comparatively large for small values of , thereby increasing the relative priority of the last link.
Illustrative examples (cont’d) • Simulation results for Tandem Queue
Illustrative examples (cont’d) • Clique
Illustrative examples (cont’d) • Dumbbell Topology
Illustrative examples (cont’d) • Tree topology
Illustrative examples (cont’d) • Cycle topology K=2: X={1,2,3,4,5,6,7,8} K=1: X1={1,2,3} X2={6,7,8}
Conclusion • This paper develop a new approach to reduce the bottlenecksin a multihop wireless to single-queue systems to carry out lower bound analysis. • The analysis is very general and admits a large class of arrival processes. • The analysis can be readily extended to handle channel variations.
Comments • How to identify the bottlenecks in a wireless mesh network ? • The analysis model can only obtain the lower bound of “expected delay time” • How good is the lower bound ? • especially when K is large.