Download
1 / 9
130 likes | 298 Views
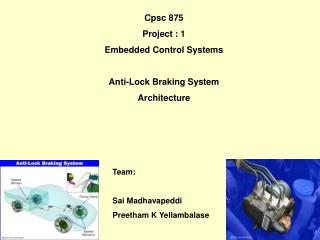
Anti-Lock Braking System. ABS1 Presenter: Josh Walworth Demo Given by: Ryan Stephenson. Unique Feature: Partitions. Two distinct functional divisions Suggested by specifications Manifested in diagrams and prototype Components: Vehicle Anti-Lock Braking System.

E N D
Anti-Lock Braking System ABS1 Presenter: Josh Walworth Demo Given by: Ryan Stephenson
Unique Feature: Partitions • Two distinct functional divisions • Suggested by specifications • Manifested in diagrams and prototype • Components: • Vehicle • Anti-Lock Braking System
What do partitions provide? • Advantages of partitioned structure • Simplifies the models • Encourages cohesion • Highlights any misinterpreted requirements • When ABS hardware fails, this division ensures that normal braking still occurs.
Key Model: Class Diagram • Two levels of aggregation form abstract foundation for requirements analysis • Why class diagram is key: • Developed first • Implies dynamic component interactions • Connection to problem domain • Structure for OO solution design • Relatively Simple
Vehicle Wheel Caliper ABS Sensor Controller PM Model
Critical Properties 1. ABS braking state will eventually be exited • Liveness • [] (state==absbrake -> <> state!=absbrake) 2. ABS braking will never disable normal braking (ie. during a failure) • Safety • [] (!systemTestPassed -> <> state==normalbrake)
Promela and XSpin • Results of analysis • LTL formulas input to XSpin • Exhaustive checking • Both properties reported valid • Property #1: This is good news • Property #2: Must go through reset (not feasible)
Demo of Prototype • High-level features of User Interface: • Condition Settings (to provide road and independent wheel slip information) • Vehicle Action Buttons/Sliders (to start the car, accelerate, and brake) • Readouts (providing speed and braking information)
Scenario(s) • 3 Scenarios will be run through: normal road conditions, icy conditions, and wet conditions. • 1) Set Conditions • 2) Accelerate to top speed • 3) Apply Brakes • 4) View Results