Download
1 / 19
200 likes | 225 Views
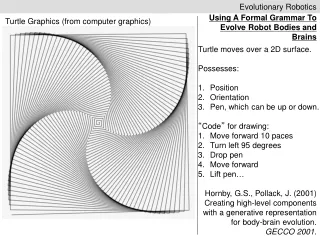
Explore adding transferability to fitness function in Evolutionary Robotics. Koos, S. and Mouret, J.-B. & Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10 Proceedings. Define transferability using two fitness objectives - rewarding desired behavior and penalizing differences between simulated and real behavior. Discuss challenges of evaluating transferability on real robots and measuring behavioral similarity.

E N D
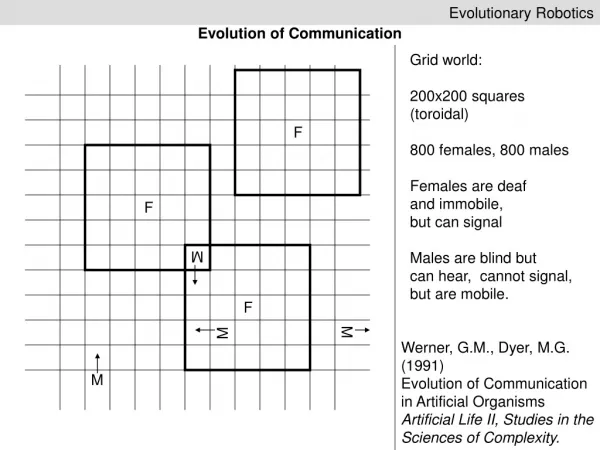
Evolutionary Robotics Transferability Question: Could the transferability of a controller be added to the fitness function? How to define transferability? Solution: Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Multi-objective optimization (MOO) Objective 2: Behavior Objective 1: Transferability dominated : there exists another solution, t, for which all objectives ot >= all objectives os solution s = non-dominated : otherwise Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Multi-objective optimization (MOO) x = controller at generation i = non-dominated controller at generation i+1 = dominated controller at generation i+1 Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Multi-objective optimization (MOO) Q: Why low distance low disparity? x = controller at generation i = non-dominated controller at generation i+1 = dominated controller at generation i+1
Evolutionary Robotics Transferability Question: Could the transferability of a controller be added to the fitness function? How to define transferability? Solution: Use two fitness objectives: One that rewards for the desired behavior, another that punishes for differences between simulated and real behavior (transferability) Problem 1: …but to compute transferability for each evolved controller, have to evaluate each on the real robot! Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Multi-objective optimization (MOO) Objective 2: Behavior Objective 1: Transferability Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Multi-objective optimization (MOO) Objective 2: Behavior Objective 1: Transferability Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Multi-objective optimization (MOO) Objective 2: Behavior Objective 1: Transferability Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Multi-objective optimization (MOO) “Similar” behavior ? Objective 2: Behavior “Different” behavior ? Objective 1: Transferability Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Question: Could the transferability of a controller be added to the fitness function? How to define transferability? Solution: Use two fitness objectives: One that rewards for the desired behavior, another that punishes for differences between simulated and real behavior (transferability) Problem 1: …but to compute transferability for each evolved controller, have to evaluate each on the real robot! Solution 1: Estimate transferability of a controller based on behavioral similarity to a tested controller. Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Question: Could the transferability of a controller be added to the fitness function? How to define transferability? Solution: Use two fitness objectives: One that rewards for the desired behavior, another that punishes for differences between simulated and real behavior (transferability) Problem 1: …but to compute transferability for each evolved controller, have to evaluate each on the real robot! Problem 2: …how to measure the similarity between behaviors? Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Problem 2: …how to measure the similarity between behaviors? Solution 2: Define a distance measure between any two behaviors. Define behavior b as a vector: b = (f1, f2, f3) f1 = distance traveled by robot f2 = mean height of the robot during travel f3 = final orientation of the robot ci = controller i; bi = behavior produced by controller i. Question: How to define the transferability of controller i? Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Problem 2: …how to measure the similarity between behaviors? Solution 2: Define a distance measure between any two behaviors. Define behavior b as a vector: b = (f1, f2, f3) f1 = distance traveled by robot f2 = mean height of the robot during travel f3 = final orientation of the robot ci = controller i; bi = behavior produced by controller i. Question: How to define the transferability of controller i? Solution: c(s)i = controller i used in (s)imulation c(r)i = controller i used in (r)eality Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Problem 1: …but to compute transferability for each evolved controller, have to evaluate each on the real robot! Solution 1: Estimate transferability of a controller based on behavioral similarity to a tested controller. Estimated transferability of controller c = CT = set of already-transferred controllers Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Problem 1: …but to compute transferability for each evolved controller, have to evaluate each on the real robot! Solution 1: Estimate transferability of a controller based on behavioral similarity to a tested controller. Problem 2: …how to measure the similarity between behaviors? Solution 2: Define a distance measure between any two behaviors. Problem 3: Which controller to try in reality next? Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Problem 1: …but to compute transferability for each evolved controller, have to evaluate each on the real robot! Solution 1: Estimate transferability of a controller based on behavioral similarity to a tested controller. Problem 2: …how to measure the similarity between behaviors? Solution 2: Define a distance measure between any two behaviors. Problem 3: Which controller to try in reality next? Solution 3: The one most “different” from those in the population. Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.
Evolutionary Robotics Transferability Problem 1: …but to compute transferability for each evolved controller, have to evaluate each on the real robot! Solution 1: Estimate transferability of a controller based on behavioral similarity to a tested controller. Problem 2: …how to measure the similarity between behaviors? Solution 2: Define a distance measure between any two behaviors. Problem 3: Which controller to try in reality next? Solution 3: The one most “different” from those in the population. CT = already-transferred controllers Koos, S. and Mouret, J.-B. and Doncieux, S. (2010). Crossing the Reality Gap in Evolutionary Robotics by Promoting Transferable Controllers. GECCO'10: Proceedings of the 12th annual conference on Genetic and evolutionary computation.