Download
1 / 15
150 likes | 334 Views
Integrality Gaps for Sparsest Cut and Minimum Linear Arrangement Problems. Nikhil R. Devanur Subhash A. Khot Rishi Saket Nisheeth K. Vishnoi. Sparsest Cut Problem (SCP) and b -Balanced Cuts (BSP). Given undirected graph G=(V,E) , find subset of nodes S, |S|<|V|/2 that minimizes

E N D
Integrality Gaps for Sparsest Cut and Minimum Linear Arrangement Problems Nikhil R. Devanur Subhash A. Khot Rishi Saket Nisheeth K. Vishnoi
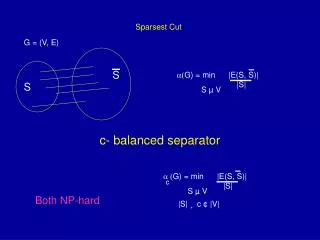
Sparsest Cut Problem (SCP) and b-Balanced Cuts (BSP) • Given undirected graph G=(V,E), find subset of nodes S, |S|<|V|/2 that minimizes |E(S, V\S)| / |S|·|V\S| • b-Balanced cuts ensure that S and V\S are at least bn in size, where 0≤b≤1/2. • b-Balanced Separator Problem (BSP) satisfies both conditions
Previously known results • An f(n)-approximation algorithm for SCP can be applied iteratively to obtain O(f(n)) approximation algorithm for BSP • [Leighton-Rao, JACM 1999] a linear-programming relaxation produces O(log n) approximation to SCP.
Linear Programming (LP) Review • Given matrix A, and vectors b and c, find x • Maximize cT·x • Subject to A·x≤b, x≥0 • NP-hard to find optimal integral solution • Relatively easy to find a fractional solution • Simplex method, Ellipsoid method • Approximation results by rounding fractional x • Lower bound of the approximation factor is sometimes called “integrality gap”
Semidefinite Programming (SDP) • Find X that maximizes ∑cij∙xij • Subject to • ∑aijk∙xij = bk • X is a symmetric and positive semidefinite matrix • Equivalent to vector programming (VP) • Find set of vectors V • X=VTV xij=vi∙vj • Often SDP approximates better than LP
SDP references • M. Goemans and D. Williamson • MAXCUT algorithm [1995] • Extensions to MAX3SAT and MAXDICUT • D. Williamson • Great lecture notes on SDP • Comprehensive website on SDP • http://www-user.tu-chemnitz.de/~helmberg/semidef.html • List of papers maintained by Farid Alizadeh • http://rutcor.rutgers.edu/~alizadeh/Sdppage/papers.html
LP Useful dual problems Linear functions Fractional solution which has to be rounded Simplex and ellipsoid methods are poly-time SDP Same Non-linear functions Usually a vector solution which has to be matched Interior point or general convex optimization algorithms, also poly-time but with large constants Difference between LP and SDP
SDP results for graph partitioning • Arora, Rao, and Vazirani. Expander flows, geometric embeddings and graph partitioning. STOC 2004. • An SDP relaxation of the problem gives O(sqrt(log n)) approximation • ARV-conjecture • Standard SDP relaxation can give constant factor approximation
Devanur, et al. results • The standard SDP relaxations of BSP with the triangle inequality constraint have an integrality gap at least Ω(log log n) • Ω(log log n) lower bound for BSP • Implies the bound for SCP • Similar bound for Minimum Linear Arrangement Problem • Find a bijection π : V -> {1, …, n} that minimizes ∑e=(u,v) |π(u)-π(v)|
SDP relaxation for SCP • How to encode any cut of the graph. • If node i is left of the cut, set it equal to some vector w. Otherwise, set it to –w.
SDP relaxation for SCP (con’t) • The following objective function and constraints are equal to the sparsity value.
Algorithm for SCP • Solve the SDP • Choose w • Obtain a plain orthogonal to w • For all nodes i whose vi is on w side of the plane, place them in S • For all other nodes, place them in V\S
SDP relaxation for BSP - Main Theorem • There are absolute constants c1, c2> 0 such that, for every large enough n there exists a multi-graph G(V;E) on n vertices, and a vector assignment i->vi for every i in V s.t. • Every (1/3, 2/3) balanced cut must contain at least c1∙|E|∙(log log n / log n) • The vector assignment gives a low SDP objective value < c2∙|E|∙(1/log n) • Vectors are well-separated • Δ-inequality on the vectors holds
SDP relaxation for BSP (con’t) • Value of the b-Balanced sparsest cut is given by the following objective function