Download
1 / 42
450 likes | 651 Views
Model Selection and Validation. “All models are wrong; some are useful.” George E. P. Box Some slides were taken from: J. C. Sapll: M ODELING C ONSIDERATIONS AND S TATISTICAL I NFORMATION J. Hinton: Preventing overfitting Bei Yu: Model Assessment. Overfitting.

E N D
Model Selection and Validation “All models are wrong; some are useful.” George E. P. Box Some slides were taken from: J. C. Sapll: MODELING CONSIDERATIONSAND STATISTICAL INFORMATION J. Hinton: Preventing overfitting Bei Yu: Model Assessment
Overfitting • The training data contains information about the regularities in the mapping from input to output. But it also contains noise • The target values may be unreliable. • There is sampling error. There will be accidental regularities just because of the particular training cases that were chosen. • When we fit the model, it cannot tell which regularities are real and which are caused by sampling error. • So it fits both kinds of regularity. • If the model is very flexible it can model the sampling error really well. This is a disaster.
Which model do you believe? The complicated model fits the data better. But it is not economical A model is convincing when it fits a lot of data surprisingly well. It is not surprising that a complicated model can fit a small amount of data. A simple example of overfitting
Generalization • The objective of learning is to achieve good generalization to new cases, otherwise just use a look-up table. • Generalization can be defined as a mathematical interpolation or regression over a set of training points: f(x) x
Generalization • Over-Training is the equivalent of over-fitting a set of data points to a curve which is too complex • Occam’s Razor (1300s, English Logician): • “plurality should not be assumed without necessity” • The simplest model which explains the majority of the data is usually the best
Generalization Preventing Over-training: • Use a separate test or tuning set of examples • Monitor error on the test set as network trains • Stop network training just prior to over-fit error occurring - early stopping or tuning • Number of effective weights is reduced • Most new systems have automated early stopping methods
Generalization Weight Decay: an automated method of effective weight control • Adjust the bp error function to penalize the growth of unnecessary weights: where: = weight -cost parameter is decayed by an amount proportional to its magnitude; those not reinforced => 0
Formal Model Definition • Assume model z = h(x,) + v,where z is output, h(·) is some function, x is input, v is noise, and is vector of model parameters A fundamental goal is to take n data points and estimate , forming
Model Error Definition • Given a data set [xi,yi], i = 1,..,n • Given a model output h(x,n),wherenis taken from some family of parameters, the sum squared errors (SSE, MSE) is Σi[yi - h(xi,n)]2, • The likelihood is ΠiP(h(xi,n)|xi)
Error surface as a function of Model parameters can look like this
Error surface can also look like this Which one is better?
Properties of the error surfaces • The first surface is rough, thus a small change in parameter space can lead to large change in error • Due to the steepness of the surface, a minimum can be found, although a gradient-descent optimization algorithm can get stuck in local minima • The second is very smooth thus, large change in parameter set does not lead to much change in model error • In other words, it is expected that generalization performance will be similar to performance on a test set
Parameter stability • Finer detail: while the surface is very smooth, it is impossible to get to the true minima. • Suggests that models that penalize on smoothness may be misleading. • Breiman (1992) has shown that even in simple problems and simple nonlinear models, the degree of generalization is strongly dependent on the stability of the parameters.
Bias-Variance Decomposition • Assume: • Bias-Variance Decomposition: • K-NN: • Linear fit: • Ridge Regression:
Bias-Variance Decomposition • The MSE of the model at a fixed x can be decomposed as: E{[h(x, ) E(z|x)]2|x} = E{[h(x, ) E(h(x, ))]2|x}+ [E(h(x, )) E(z|x)]2 = variance at x + (bias at x)2 where expectations are computed w.r.t. • Above implies: Model too simple High bias/low variance Model too complex Low bias/high variance
Model Selection • The bias-variance tradeoff provides conceptual framework for determining a good model • bias-variance tradeoff not directly useful • Many methods for practical determination of a good model • AIC, Bayesian selection, cross-validation, minimum description length, V-C dimension, etc. • All methods based on a tradeoff between fitting error (high variance) and model complexity (low bias) • Cross-validation is one of the most popular model fitting methods
Cross-Validation • Cross-validation is a simple, general method for comparing candidate models • Other specialized methods may work better in specific problems • Cross-validation uses the training set of data • Does not work on some pathological distributions • Method is based on iteratively partitioning the full set of training data into training and test subsets • For each partition, estimatemodel from training subset and evaluate model on test subset • Select model that performs best over all test subsets
Division of Data for Cross-Validation with Disjoint Test Subsets
Typical Steps for Cross-Validation Step 0 (initialization) Determine size of test subsets and candidate model. Let i be counter for test subset being used. Step 1 (estimation) For the ith test subset, let the remaining data be the ithtraining subset. Estimate from this training subset. Step 2 (error calculation) Based on estimate for from Step 1 (ith training subset), calculate MSE (or other measure) with data in ith test subset. Step 3 (new training/test subset) Update i to i+ 1 and return to step 1. Form mean of MSE when all test subsets have been evaluated. Step 4 (new model) Repeat steps 1 to 3 for next model. Choose model with lowest mean MSE as best.
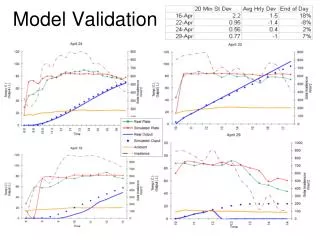
Numerical Illustration of Cross-Validation (Example 13.4 in ISSO) • Consider true system corresponding to a sine function of the input with additive normally distributed noise • Consider three candidate models • Linear (affine) model • 3rd-order polynomial • 10th-order polynomial • Suppose 30 data points are available, divided into 5 disjoint test subsets • Based on RMS error (equiv. to MSE) over test subsets, 3rd-order polynomial is preferred • See following plot
Numerical Illustration (cont’d): Relative Fits for 3 Models with Low-Noise Observations
Standard approach to Model Selection • Optimize concurrently the likelihood or mean squared error together with a complexity penalty. • Some penalties: norm of the weight vector, smoothness, number of terminating leaves (in CART), variance weights, cross validation... etc. • Spend most computational time on optimizing the parameter solution via sophisticated Gradient descent methods or even global-minimum seeking methods.
Alternative approach MDL based model selection Later
Preventing overfitting • Use a model that has the right capacity: • enough to model the true regularities • not enough to also model the spurious regularities (assuming they are weaker). • Standard ways to limit the capacity of a neural net: • Limit the number of hidden units. • Limit the size of the weights. • Stop the learning before it has time to over-fit.
Limiting the size of the weights • Weight-decay involves adding an extra term to the cost function that penalizes the squared weights. • Keeps weights small unless they have big error derivatives. C w
The effect of weight-decay • It prevents the network from using weights that it does not need. • This can often improve generalization a lot. • It helps to stop it from fitting the sampling error. • It makes a smoother model in which the output changes more slowly as the input changes. w • If the network has two very similar inputs it prefers to put half the weight on each rather than all the weight on one. w/2 w w/2 0
Model selection • How do we decide which limit to use and how strong to make the limit? • If we use the test data we get an unfair prediction of the error rate we would get on new test data. • Suppose we compared a set of models that gave random results, the best one on a particular dataset would do better than chance. But it wont do better than chance on another test set. • So use a separate validation set to do model selection.
Using a validation set • Divide the total dataset into three subsets: • Training data is used for learning the parameters of the model. • Validation data is not used of learning but is used for deciding what type of model and what amount of regularization works best. • Test data is used to get a final, unbiased estimate of how well the network works. We expect this estimate to be worse than on the validation data. • We could then re-divide the total dataset to get another unbiased estimate of the true error rate.
Early stopping • If we have lots of data and a big model, its very expensive to keep re-training it with different amounts of weight decay. • It is much cheaper to start with very small weights and let them grow until the performance on the validation set starts getting worse (but don’t get fooled by noise!) • The capacity of the model is limited because the weights have not had time to grow big.
When the weights are very small, every hidden unit is in its linear range. So a net with a large layer of hidden units is linear. It has no more capacity than a linear net in which the inputs are directly connected to the outputs! As the weights grow, the hidden units start using their non-linear ranges so the capacity grows. Why early stopping works outputs inputs
Model Assessment and Selection • Loss Function and Error Rate • Bias, Variance and Model Complexity • Optimization • AIC (Akaike Information Criterion) • BIC (Bayesian Information Criterion) • MDL (Minimum Description Length)
Key Methods to Estimate Prediction Error • Estimate Optimism, then add it to the training error rate. • AIC: choose the model with smallest AIC • BIC: choose the model with smallest BIC
Model Assessment and Selection • Model Selection: • estimating the performance of different models in order to choose the best one. • Model Assessment: • having chosen the model, estimating the prediction error on new data.
Approaches • data-rich: • data split: Train-Validation-Test • typical split: 50%-25%-25% (how?) • data-insufficient: • Analytical approaches: • AIC, BIC, MDL, SRM • efficient sample re-use approaches: • cross validation, bootstrapping
Summary • Cross validation: A practical way to estimate model error. • Model Estimation should be done with a penalty • When best model estimation is chosen, estimate on whole data or average models on cross validated data
Loss Functions • Continuous Response • Categorical Response squared errorabsolute error 0-1 losslog-likelihood
Error Functions • Training Error: • the average loss over the training sample. • Continuous Response: • Categorical Response: • Generalization Error: • the expected prediction error over an independent test sample. • Continuous Response: • Categorical Response:
Detailed Decomposition for Linear Model Family • average squared bias decomposition =0 for LLSF; >0 for ridge regression trade off with variance;