Download
1 / 1
10 likes | 63 Views
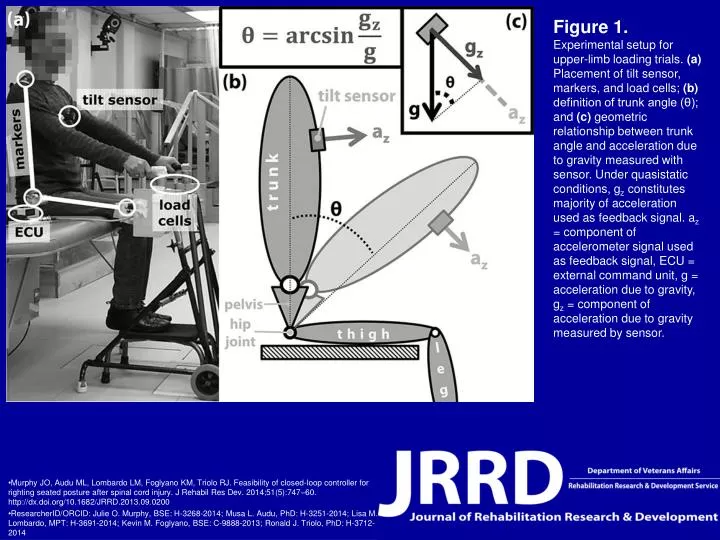
See the experimental setup for upper-limb loading trials integrating tilt sensors, markers, and load cells. Explore the dynamic relationships between trunk angle, gravity, and feedback signals for seated posture control. Research conducted by Murphy JO et al. (2014).

E N D
Figure 1. Experimental setup for upper-limb loading trials. (a) Placement of tilt sensor, markers, and load cells; (b) definition of trunk angle (θ); and (c) geometric relationship between trunk angle and acceleration due to gravity measured with sensor. Under quasistatic conditions, gz constitutes majority of acceleration used as feedback signal. az = component of accelerometer signal used as feedback signal, ECU = external command unit, g = acceleration due to gravity, gz = component of acceleration due to gravity measured by sensor. • Murphy JO, Audu ML, Lombardo LM, Foglyano KM, Triolo RJ. Feasibility of closed-loop controller for righting seated posture after spinal cord injury. J Rehabil Res Dev. 2014;51(5):747–60.http://dx.doi.org/10.1682/JRRD.2013.09.0200 • ResearcherID/ORCID: Julie O. Murphy, BSE: H-3268-2014; Musa L. Audu, PhD: H-3251-2014; Lisa M. Lombardo, MPT: H-3691-2014; Kevin M. Foglyano, BSE: C-9888-2013; Ronald J. Triolo, PhD: H-3712-2014
