Download
1 / 16

E N D
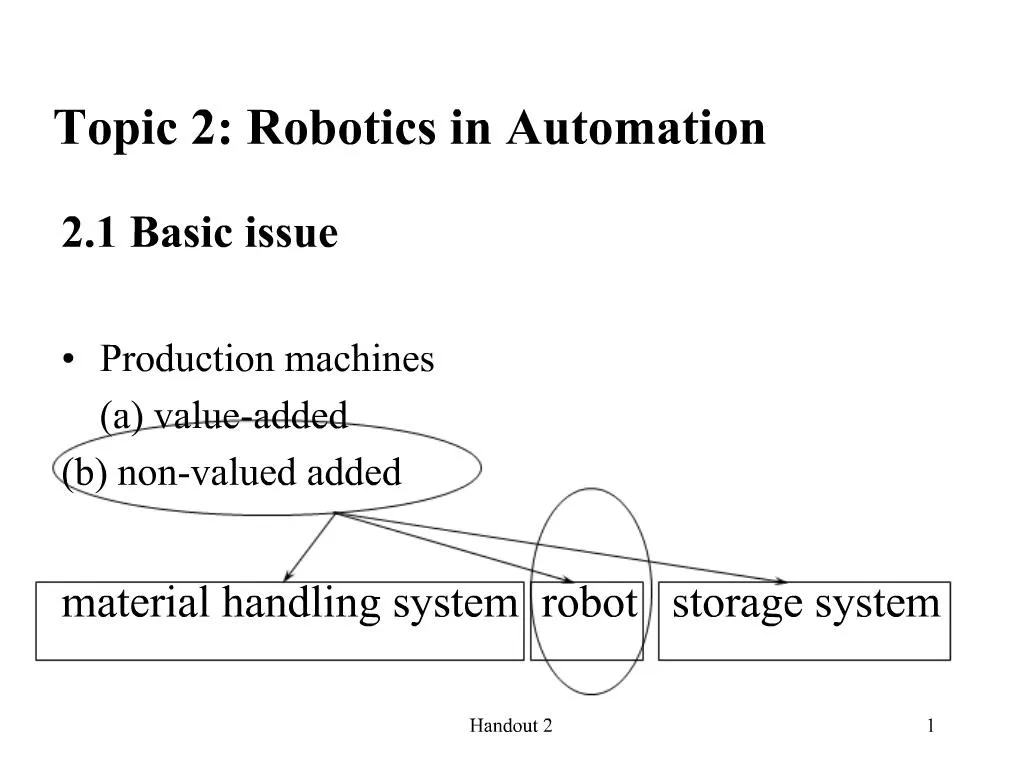
1. 2004 Handout 2 1 Topic 2: Robotics in Automation 2.1 Basic issue
Production machines
(a) value-added
(b) non-valued added
material handling system robot storage system
2. 2004 Handout 2 2 Robot Definition
Functional viewpoint:
- automatically controlled,
- reprogrammable multipurpose
- manipulative machine with several reprogrammable axes
Structural viewpoint: (see Fig.2-1)
- mechanical arm (see Fig.2-2)
- controller
3. 2004 Handout 2 3
4. 2004 Handout 2 4
5. 2004 Handout 2 5 - teach station
- work cell interface
- program storage device
- power system (electrical, hydraulic, etc.)
- end-effector or tooling or gripper
Mechanical arm (Fig.2-2)
- position motion
- wrist motion
Types of industrial robots
6. 2004 Handout 2 6 - Cartesian geometry:
(a) Gantry - type (Fig.2-3)
(b) Cartesian (Fig.2-4)
- Spherical geometry (Fig.2-5)
- Cylindrical coordinate (Fig. 2-6)
- Articulated geometry
(a) vertical (Fig. 2-7)
(b) horizontal (Fig. 2-8)
7. 2004 Handout 2 7
8. 2004 Handout 2 8
9. 2004 Handout 2 9
10. 2004 Handout 2 10
11. 2004 Handout 2 11
12. 2004 Handout 2 12
13. 2004 Handout 2 13 Work space
14. 2004 Handout 2 14 Robot Controller (Fig.2-9)
15. 2004 Handout 2 15 Gripper (Fig.2-10)
16. 2004 Handout 2 16 Issues:
(a) given a robot, calculate the workspace
(b) given a require motion of the end-effector, design the controller to follow the required motion
For issue (b), we have further two fundamental issues:
(b1) inverse kinematics, and
(b2) motion planning