Download
1 / 20
200 likes | 282 Views
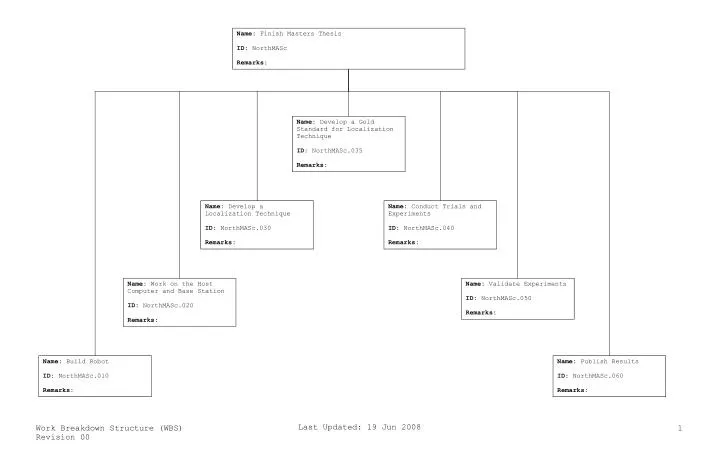
Name: Finish Masters Thesis ID: NorthMASc Remarks:. Name: Develop a Gold Standard for Localization Technique ID: NorthMASc.035 Remarks:. Name: Develop a Localization Technique ID: NorthMASc.030 Remarks:. Name: Conduct Trials and Experiments ID: NorthMASc.040 Remarks:.

E N D
Last Updated: 19 Jun 2008 Name: Finish Masters Thesis ID:NorthMASc Remarks: Name:Develop a Gold Standard for Localization Technique ID:NorthMASc.035 Remarks: Name:Develop a Localization Technique ID:NorthMASc.030 Remarks: Name:Conduct Trials and Experiments ID:NorthMASc.040 Remarks: Name: Work on theHost Computer and Base Station ID:NorthMASc.020 Remarks: Name: Validate Experiments ID:NorthMASc.050 Remarks: Name:Build Robot ID:NorthMASc.010 Remarks: Name: Publish Results ID:NorthMASc.060 Remarks:
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Build Robot ID: NorthMASc.020 Remarks: build a three-wheeled robot suitable for experiments in indoor and outdoor terrain. Name: Build Chassis ID:NorthMASc.010.0010 Remarks: Name: Sensors ID:NorthMASc.020.0050 Remarks: special wheel encoders (two) for the slave caster… Name: Construct Driveline ID:NorthMASc.010.0020 Remarks: Name: Power Distribution ID:NorthMASc.020.0060 Remarks: batteries for everyone! Name: Build Slave Caster ID:NorthMASc.020.0030 Remarks: Marty will help build this using a four-slip-ring config for the wheel encoder. Name: Safety Systems ID:NorthMASc.020.0070 Remarks: fault-tolerance? Prevent tip-over and other problems? Name: Find and Incorporate an on-board uC ID:NorthMASc.020.0040 Remarks: Name: Communication ID:NorthMASc.020.0080 Remarks: Marc Adam to help with this?
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Find and Incorporate an on-board uC ID: NorthMASc.020.0040 Remarks: Name: Select a Suitable uC ID:NorthMASc.020.0040.005 Remarks: the microcontroller development board should have an RTOS (RTLinux?), and have suitable interfacing for several timing/encoder/analog/PWM channels. Name: Develop a Comm Link for Control Commands/Status ID:NorthMASc.020.0040.020 Remarks: to/from the human operator (teleoperation) Name: Develop Real-Time Data Capture ID:NorthMASc.020.0040.025 Remarks: obtain multi-sensor data in real-time and stream to the host using the telemetry package. Name: Host-to-Target Programming and Debugging ID:NorthMASc.020.0040.010 Remarks: JTAG? BDM pod or wiggler? Name: Localization Engine ID:NorthMASc.020.0040.030 Remarks: on-board, real-time localization... Name: Build a Telemetry and Logging Package for the uC ID:NorthMASc.020.0040.015 Remarks:
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Work on theHost Computer and Base Station ID: NorthMASc.020 Remarks: find and develop software on a PC to interact with the mobile robot, experiments and human operator. Name: Obtain Development Environments ID:NorthMASc.020.0010 Remarks: Name: Communications ID:NorthMASc.020.0020 Remarks: Name: Operator Interface ID:NorthMASc.020.0030 Remarks: build an interface between the operator and robot to allow the operator to control the robot remotely. Name:Program for Sending/Receiving Data from uC ID:NorthMASc.020.0020.005 Remarks: Name: IDE for Target uC on-Board Robot ID:NorthMASc.020.0010.005 Remarks: Name: Development Environment for Localization Technique ID:NorthMASc.020.0010.010 Remarks: Name:Program for Sending/Receiving Data within Host PC ID:NorthMASc.020.0020.010 Remarks: Name: Scientific Analysis Toolkit ID:NorthMASc.020.0010.015 Remarks: for validating/verifying results from experiments. Name: Find a BSP ID:NorthMASc.020.0010.020 Remarks: for hardware on-board the target uC.
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Develop a Localization Technique ID: NorthMASc.030 Remarks: implement a technique for improving the localization of a wheeled mobile robot operating in several terrains. Name: Investigation/Theoretical Considerations ID:NorthMASc.030.0010 Remarks: Name: Preliminary Simulation of Technique ID:NorthMASc.030.0020 Remarks: Name: Conduct technique using Experimental Data ID:NorthMASc.030.0030 Remarks: Name: Validate Technique ID:NorthMASc.030.0040 Remarks: statistically significant improvement compared to other approaches? Name: Conduct Literature Survey ID:NorthMASc.030.0010.005 Remarks: Name: Develop a Model or Basis of the Proposed Technique ID:NorthMASc.030.0010.010 Remarks: Name: Verify the Model is Acceptable ID:NorthMASc.030.0010.015 Remarks: conduct one or more “benchmark” tests to prove the validity of the model and/or technique.
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Develop a Gold Standard for Localization Technique ID: NorthMASc.035 Remarks: implement a technique for verifying the accuracy and performance of the proposed technique. Name: Purchase Equipment ID:NorthMASc.035.0010 Remarks: Name: Design and Interfacing ID:NorthMASc.035.0020 Remarks: Name: Gather Data and Verify Operation ID:NorthMASc.035.0030 Remarks: Name: Integrate with Other Systems ID:NorthMASc.035.0040 Remarks:
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Conduct Trials and Experiments ID:NorthMASc.040 Remarks:conduct several experiments to verify the effectiveness of the localization technique for the mobile robot. Name:Preliminary Evaluation ID:NorthMASc.040.0010 Remarks: Name: Robot Calibration and Preparation ID:NorthMASc.040.0020 Remarks: Name:Experiment Preparation ID:NorthMASc.040.0030 Remarks: Name:Conduct Experiments ID:NorthMASc.040.0040 Remarks: Name: Gather Data ID:NorthMASc.040.0040.005 Remarks:allow robot to move through several regions and collect data on the performance of the localization engine. Name:Suitability of Chassis over Various Terrain ID:NorthMASc.040.0010.005 Remarks:conduct trials in several environments to assess suitability of the wheeled mobile robot for future experiments. Name:Trials to Remove Systematic Errors ID:NorthMASc.040.0020.005 Remarks:conduct the UBMark test to identify and null the systematic errors. Name: Terrain Recce ID:NorthMASc.040.0030.005 Remarks:assess several locations for experiments in localization of a wheeled mobile robot. Name:Set-up of Test Sites ID:NorthMASc.040.0030.010 Remarks:liaise with CivEng dept to arrange for testing/surveying of outdoor (and indoor?) environments. Name: Assess Core Functions ID: NorthMASc.040.0010.010 Remarks: validate that telemetry between robot and host is working.
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Validate Experiments ID: NorthMASc.050 Remarks: Name: Consolidate and Process Experimental Data ID: NorthMASc.050.0010 Remarks: perform any necessary processing such as linearization, least squares fitting, etc. Name: Compare Data ID:NorthMASc.050.0020 Remarks: use T-Test, mean, STD, Parametric ANOVA, etc to analyze the data for its statistical significance. Name:Discuss Results ID:NorthMASc.050.0030 Remarks: explain the significance of the data in relation to theoretical models and calculations. Do the results agree with the models?
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: Publish Results ID: NorthMASc.060 Remarks: Name: Write Thesis ID: NorthMASc.060.0010 Remarks: Name: Write Conference Paper(s) ID:NorthMASc.060.0020 Remarks:
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---
Last Updated: 19 Jun 2008 Name: dd ID: ff Remarks: gg Name: ee ID:ee Remarks: dd ---TEMPLATE PAGE---
Last Updated: 19 Jun 2008 --- This Page Intentionally Left Blank ---