Download
1 / 21
210 likes | 299 Views
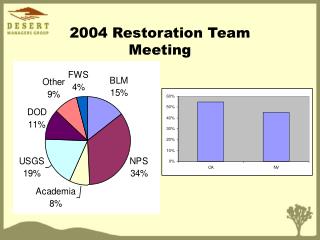
SECON 2004 Team 2. Member Responsibilities. Visual Signal Detector. Line-Following System. Ball Retrieval Mechanism. Microcontroller. Liquid Crystal Display. Range Sensing System. LCD. Drive Motor Controller. Ball Pickup/Release Objectives.

E N D
Visual Signal Detector Line-Following System Ball Retrieval Mechanism Microcontroller Liquid Crystal Display Range Sensing System LCD Drive Motor Controller
Ball Pickup/Release Objectives • Three steel ball bearings must be acquired from the hunting stations • 1” diameter, 45.36 gm each • All ball bearings must be deposited into a holding tray aboard the robot
Permanent Magnet • Why use a permanent magnet? • Power • The power consumption is zero for a permanent magnet, as opposed to high power consumption for an electromagnet • Weight • A permanent magnet weighs less than an electromagnet; therefore, the power consumed by the driving servos for the mechanical arm will be lower
Ball Storage/Delivery Objectives • Three ball bearings must be successfully contained until the end of the trial • All ball bearings must be deployed into a holding container at the end of the trial
Holding/Deployment Tray • A specially designed “dump truck” tray will serve dual purpose • Outer shell allows successful ball bearing containment • Servo will lower inner shell for efficient ball bearing delivery
Body Design • The overall size of robot must not exceed rule-specified dimensions • 2’ x 2’ x 2’ • Body cut at Raspet Flight Lab
Locomotion Objectives • Robot must be able to successfully traverse course in 5 minutes or less • Wheels must be able to fully support the weight of the robot
Motor Controller • Allows individual control of both DC drive motors • Operating range of 4.8 to 25 V • Capable of supplying up to 2.5 A to each drive motor
Drive Motors and Wheels • Drive Motors • Compact design allows for spacing flexibility • Operating voltage of 12 V allows for reduced power consumption • Wheels • Lightweight nylon rims • Low profile tires reduce compression
Ball Container Detection Objectives • The robot must be able to accurately detect objects as near as 5 cm • Must be capable of digitally interfacing with the microcontroller
Ultrasonic Rangefinder • Devantech SRF08 module • Detection range of 3 cm to 6 m • Uses digital I/O lines for communication
LCD Objectives • Must display messages detailing current tasks • Displayed text must be readable from 5 to 8 ft
Max Orbital LCD • Initially chosen because of possible ambient lighting conditions • Text can be made large enough to read from required distances
Power Supply Objectives • Must be able to supply given load for four trials • (5 minutes per trial)*(4 trials) = 20 minutes • Size must not cause robot dimensions to exceed 2’ x 2’ x 2’ • Must not cause total robot weight to exceed 10 lbs • Rechargeable capabilities preferable
On-Board Battery • Power Rating • 12V, 2AH • Weight • 1.5 lbs. • Size • 5.75” x 0.75” x 3.5” • Rechargeable
Current Drain Expected Battery Life = Battery Rating / Total Current Drain *Current values are estimates ** Expected current drain will be less than shown, since not all components operate for the same duration
End of Semester Prototype • Begin in Starting Area • Receive signal from traffic LED • Follow lines • Retrieve a ball bearing from a single given station • Deliver ball bearing to final storing container
Future Work • Retrieve ball bearings from all three hunting stations • Deliver all ball bearings to final storing container • Dominate SECON 2004
Acknowledgements • ECE Department • IEEE • Dr. Lori Bruce • Dr. Patrick Donohoe • Raspet Flight Research Lab • Cypress Semiconductor