Download

1 / 12
120 likes | 355 Views
V E X Grippers (Devices that can attach to objects). Outline. Gripper Theory Control Speed Common Types of Grippers Servo Grip Motorized Grip Pneumatic Grip Roller Grip Challenge Hints Use Lock Bars to attach devices to axles Use an Ultrasonic Ranger to find objects.

E N D
Outline • Gripper Theory • Control • Speed • Common Types of Grippers • Servo Grip • Motorized Grip • Pneumatic Grip • Roller Grip • Challenge • Hints • Use Lock Bars to attach devices to axles • Use an Ultrasonic Ranger to find objects Vex Labs Gridiron Robot
Control • Holy grail of gripping: • Get object fast • Hang on • Let go quickly • This must be done under excellent control • Limit switches • Auto-functions • Ease of operation
Speed • Quickness covers mistakes • Quick to grab • Drop & re-grab • Fast • Servo gripper • Pneumatic gripper • Not fast • Roller gripper • Motor gripper
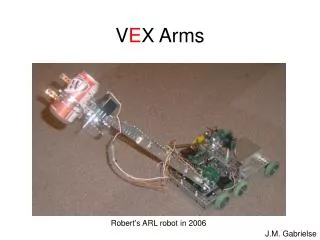
Servo Grip • Precise • Limited range of motion • Limited torque Robert’s ARL robot in 2006
Motorized Grip • Can be geared for speed or torque • More complex FVC Team 31 in 2005
Pneumatic Grip • Powerful • Reliable • Requires entire (unreliable) pneumatics system Some robot
Roller Grip • Slow • Allows for misalignment when grabbing • Won’t let go • Extends object as releasing • Simple mechanism FVC Team 34 in 2005
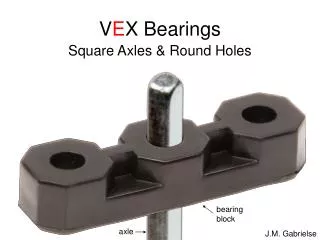
Lock-Bars Lock-bars allow for any component to be attached to an axle and rotated by a motor or servo. • Axles fit through the square holes. • Bolts fit through the round holes.
Ultrasonic Range Finder • Detect the distance to the nearest object or wall • Bounces sound waves off of objects and measures the time it takes sound waves to return • The time can be used to calculate distances from 3 cm to 3 m
Thanks/Resources • Designing Competitive Manipulators: The Mechanics & Strategy by Greg Needel (www.robogreg.com)