Download
1 / 37
380 likes | 608 Views
FRC Drive Train: Design and Implementation. Originally created by: Madison Krass, Team 488 Fred Sayre, Team 488 Modified by: Mike Mellott, Teams 48 & 3193. Questions Answered. What is a Drive Train? Re-examine their purpose What won’t I learn from this presentation?

E N D
FRC Drive Train:Design and Implementation Originally created by: Madison Krass, Team 488 Fred Sayre, Team 488 Modified by: Mike Mellott, Teams 48 & 3193
Questions Answered • What is a Drive Train? • Re-examine their purpose • What won’t I learn from this presentation? • No use reinventing the wheel… • Why does that robot have 14 wheels? • Important considerations of drive design • Tips and Good Practices
What is a Drive Train? • Components that work together to move robot from A to B • Focal point of a lot of “scouting discussion” at competitions, for better or for worse • It has to be the most reliable part of your robot! • That means it probably should be the least complicated part of your robot
Why does that robot have 14 wheels? • Design your drive train to meet your needs • Different field surfaces • Inclines and steps • Pushing or pulling objects • Time-based tasks • Omni-directional motion (yes, driving sideways!) • Useless in a drag race • Great in a minefield
Important Concepts • Traction • Double-edged sword • Power • More is better…but not always • Power Transmission • This is what makes the wheels on the bus go ‘round and ‘round • Wheel Size • Common Designs
Traction • Friction with a better connotation • Makes the robot move • Also keeps the robot in place • Prevents the robot from turning when you intend it to turn • Too much traction is a frequent problem for 4WD systems • Omni-wheels mitigate the problem, but sacrifice some traction • Wait…what’s an Omni-wheel?
Traction This is an Omni-wheel: • Rollers are attached around the circumference, perpendicular to the axis of rotation of the wheel • Allows for omni-directional motion
Power • Motors give us the power we need to make things move • Adding power to a drive train increases the rate at which we can move a given load OR increases the load we can move at a given rate • Drive trains are typically not “power-limited” • Coefficient of friction limits maximum force of friction because of robot weight limit • Shaving off 0.1 seconds on your ¼-mile time is meaningless on a 50-ft. field
More Power • Practical Benefits of Additional Motors • Decreased current draw • Lower chance of tripping breakers • Motors run cooler • Redundancy (in case one fails) • Lower center of gravity • Drawbacks • Heavier • Useful motors unavailable for other mechanisms
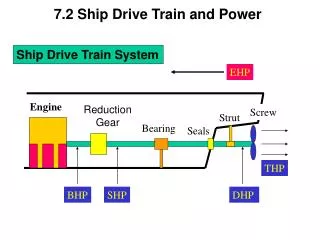
Power Transmission Method by which power is turned into traction Most important consideration in drive design Fortunately, there’s a lot of knowledge about what works well Roller Chain and Sprockets Friction Belt Timing Belt Gears Spur Worm
Power Transmission: Chain #25 (1/4”) and #35 (3/8”) most commonly used in FRC applications #35 is more forgiving of misalignment, but heavier #25 can fail under shock loading, but rarely otherwise 95-98% efficient Proper tension is critical • 5:1 reduction is about the largest single-stage ratio you can expect
Power Transmission: Friction Belt Great for low-friction applications or as a clutch Easy to work with, but requires high tension to operate properly Usually not useful for drive train applications Belt will slip under too much load
Power Transmission: Timing Belt A variety of pitches available About as efficient as chain Frequently used simultaneously as a traction device (i.e. tank treads) Comparatively expensive • Sold in custom and stock lengths • Broken belts cannot usually be repaired
Power Transmission: Gears Gearing is used most frequently “high up” in the drive train COTS gearboxes available widely and cheaply Driving wheels directly with gearing requires manufacturing precision • Spur Gears • Most common gearing we see in FRC (Tough-boxes, Shifters, Planetary Gearboxes) • 95-98% efficient per stage • Again, expect useful single-stage reduction of about 1:5 or less
Power Transmission: Gears Worm Gears Useful for very high, single-stage reductions (1:20 to 1:100) Difficult to back-drive Efficiency varies based upon design – anywhere from 40 – 90% Design must compensate for high axial thrust loading
Wheel Size Smaller wheel “pros” • Less gear reduction needed • Lower friction • Less weight Larger wheel “pros” • Lower RPM for same linear velocity (robot travel speed) • Less tread wear…less frequent tread replacement • Larger sprocket to wheel ratio, which means less tension on drive chains
Common Drive Train Styles Tank/Skid Systems: Left and right half of drive train are controlled independently (a.k.a. tank steering) • 2WD, 4WD, 6WD, More than 6WD • Tank Treads, Half-Track Holonomic Systems: Allow a robot to translate in two dimensions and rotate simultaneously • Swerve/Crab • Mecanum • Killough (Omni-drive) • Slide • Linkage
Skid/Tank Drive Systems:2-Wheel Skid • The Good • Cheap • Very simple to build • The Bad • Difficulty with inclines and uneven surfaces • Looses traction when drive wheel are lifted from the floor • Easily spins out (non-driven wheels are typically Omni-wheels or casters), meaning low traction
Skid/Tank Drive Systems:4-Wheel Skid • The Good • More easily controlled • Far better traction (than 2WD) • Easy to build • The Bad • Turning in place more difficult • Compromise between stability and maneuverability • Wheel footprint must be wider than length (or equal) to reduce stress on motors during turns
Skid/Tank Drive Systems:6-Wheel Skid Standard drive train in FRC • Stable footprint • Good power distribution Agility must be designed • Lower contact point on center wheels (1/8” – 1/4”), creating two 4WD systems • Rocking isn’t too bad at edges of robot footprint, but can be significant at the end of tall robots and long arms • Replace front or rear pair of wheels with Omni-wheels • No need to lower center wheels, making for a much more stable base
Skid/Tank Drive Systems:More than 6-Wheel Skid • Very powerful, very stable • Diminishing returns • Heavy, mechanically complex, and very expensive for marginal return In the real world, one would add more wheels to distribute a load over a greater area. • Historically, not a useful concept in most FRC games The only reason to use this system is to go over things
Skid/Tank Drive Systems:Tank Treads • Tread belts must be protected from side loads with extra wheel support • Typical belts cost $150 - $300 EACH (don’t forget spares) Again, the only reason to use this system is to go over things Very powerful, very stable platform, not for speed Heavy, mechanically complex, and very expensive for marginal return
Skid/Tank Drive Systems:Half-Track One solution for a smooth, agile tank tread system Still powerful, very stable platform • Still NOT made for high-speed lap driving Not as expensive, not as mechanically complex Tread belts must still be protected from side loads • Due to shorter-length treads, this is easier
Holonomic Drive Systems: Swerve/Crab Wheel modules rotate on the vertical axis to control direction Independently or chained together Typically 4 high-traction wheels • Potential for high-speed agility • Very complex and expensive system to design, build, control and program • Can be difficult to drive
Holonomic Drive Systems:Mecanum Rollers are attached to the circumference, but on a 45° angle to the axis of rotation of the wheel Uses concepts of vector addition to allow for true omni-directional motion No complicated steering mechanisms Requires four independently-powered wheels COTS parts make this system easily accessible but expensive
Holonomic Drive Systems:Killough (Omni) Uses concepts of vector addition to allow for true omni-directional motion No complicated steering mechanisms, fast turning Requires four independently-powered wheels • No brakes • No pushing ability • Not good on inclines • Unstable ride without “dually” omni-wheels
Holonomic Drive Systems:Slide Similar layout to 4-wheel drive with an extra wheel perpendicular to the others Uses all omni-wheels to allow robot to translate sideways • Agile, easy to build and program • No pushing power • Extra motors, wheels, gearbox needed that cannot be used elsewhere
Holonomic Drive Systems:Linkage Wheels can be mechanically rotated 90° simultaneously to allow for lateral movement • No “in-between” angles Easy to control and program Heavy, complex system to manufacture, space hog Allows for very little ground clearance
Tips and Good Practices “KISS” Principle – Keep it Simple, Stupid More important are the Four R’s: Reliability Repair-ability Relevance Reasonability
Tips and Good Practices:Reliability! The drive train is the most important consideration, period Good practices: Support shafts in two places…No more, no less Bearings should be spaced 3-5 shaft diameters apart Avoid long cantilevered loads Avoid press fits Alignment, alignment, alignment!
Tips and Good Practices:Reliability! Good practices (con’t): Keep things simple to start and add detail as the design develops Balance the goal to minimize the number of components and component complexity with the number and complexity of manufacturing processes Make your design repeatable first, and then tune it for accuracy Triangulate parts and structures to make them stiffer Avoid bending stresses—prefer tension and compression
Tips and Good Practices:Reliability! Good practices (con’t): Standardize components where possible Bolts, washers, SAE/Metric, etc. Reduce or remove friction where possible Avoid sliding friction—use rolling element bearings Avoid friction belting If given a choice, use rotary motion over linear motion (less friction) Using large sprockets with 35-series chain requires less tensioning Space wheels/sprockets such that a whole number of chain links are needed to span the distance
Tips and Good Practices:Repair-ability! You will probably fail at achieving 100% reliability Good practices: Design failure points into drive train and know where they are Accessibility is paramount you can’t fix what you can’t touch Bring spare parts, especially for unique items gears, sprockets, transmissions, mounting hardware, etc. Aim for maintenance and repair times of <10 minutes
Tips and Good Practices:Relevance! Only at this stage should you consider advanced thing-a-ma-jigs and do-whats-its that are tailored to the challenge at hand Stairs, ramps, slippery surfaces, tugs-of-war Before seasons start, there’s a lot of bragging about 12-motor drives with 18 wheels After the season…not as much
Tips and Good Practices: Reasonability! Now that you’ve devised a fantastic system of linkages and cams to climb over that wall on the field, consider if it’d just be easier, cheaper, faster, and lighter to drive around it FRC teams (especially rookies) grossly overestimate their abilities and, particularly, the time it takes to accomplish game tasks
Food for thought… It takes a lot of thought and knowledge to develop a design that requires little of either—that is the art of design!
Resources ChiefDelphi http://www.chiefdelphi.com FIRST Mechanical Design Calculator (John V-Neun) http://www.chiefdelphi.com/media/papers/1469 AndyMark http://www.andymark.com FIRST Robotics Canada Galleries http://www.firstroboticscanada.org/site/node/96